#include "tfd_modules/module_api/pddlModuleTypes.h"#include <ros/ros.h>#include <sensor_msgs/JointState.h>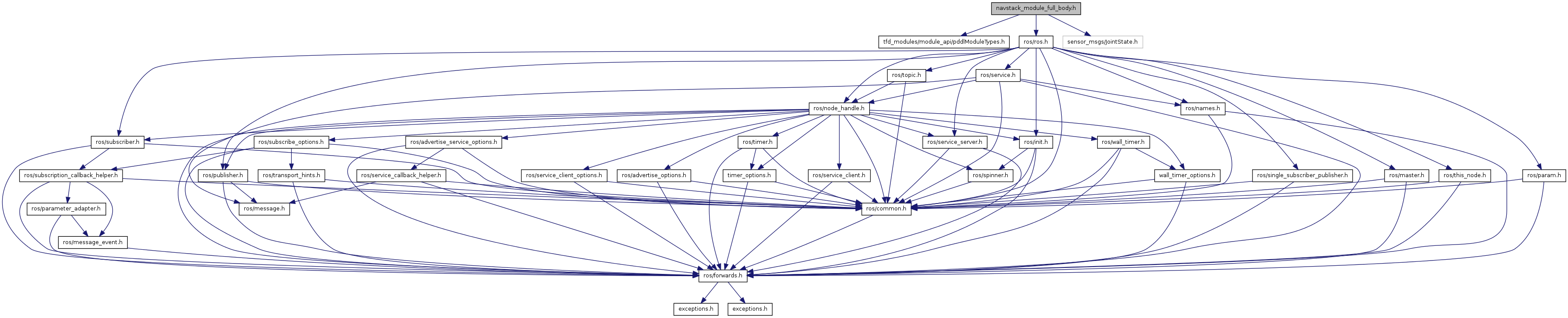
Go to the source code of this file.
Functions | |
| void | fullbody_navstack_init (int argc, char **argv) |
| double | fullbody_pathCost (const ParameterList ¶meterList, predicateCallbackType predicateCallback, numericalFluentCallbackType numericalFluentCallback, int relaxed) |
| void | jointStateCallback (const sensor_msgs::JointState &msg) |
| void | publishPlanningArmState () |
| void | switchToExecutionTopic () |
| void fullbody_navstack_init | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 80 of file navstack_module_full_body.cpp.
| double fullbody_pathCost | ( | const ParameterList & | parameterList, |
| predicateCallbackType | predicateCallback, | ||
| numericalFluentCallbackType | numericalFluentCallback, | ||
| int | relaxed | ||
| ) |
Definition at line 104 of file navstack_module_full_body.cpp.
| void jointStateCallback | ( | const sensor_msgs::JointState & | msg | ) |
Definition at line 30 of file navstack_module_full_body.cpp.
| void publishPlanningArmState | ( | ) |
Definition at line 36 of file navstack_module_full_body.cpp.
| void switchToExecutionTopic | ( | ) |
Definition at line 61 of file navstack_module_full_body.cpp.

