for testing only. Node only subscribes to topic with LaserScan message and outputs message fields. More...
#include <iostream>#include <float.h>#include <ros/ros.h>#include <ros/node_handle.h>#include <sensor_msgs/LaserScan.h>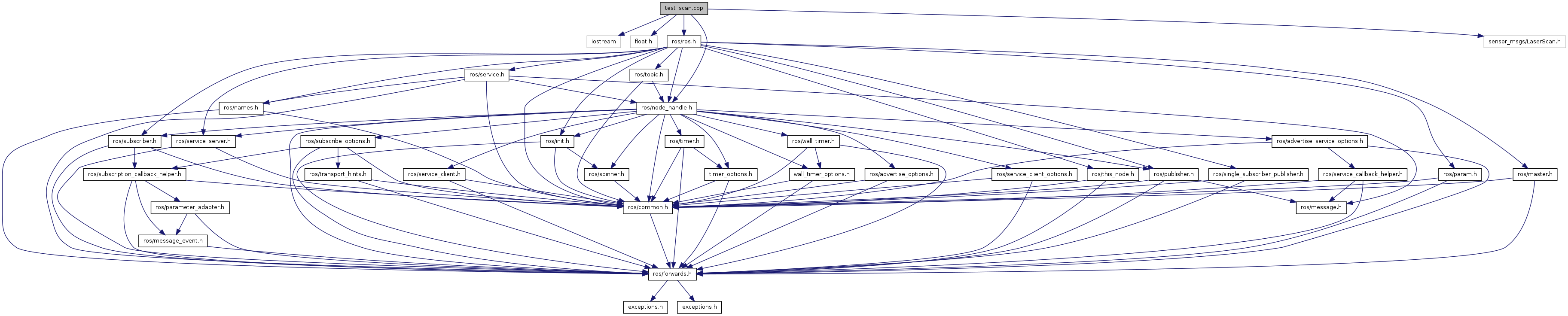
Go to the source code of this file.
Classes | |
| class | TestNode |
Functions | |
| int | main (int argc, char **argv) |
for testing only. Node only subscribes to topic with LaserScan message and outputs message fields.
Definition in file test_scan.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 96 of file test_scan.cpp.

