#include <string>#include <vector>#include <map>#include <ostream>#include "ros/serialization.h"#include "ros/builtin_message_traits.h"#include "ros/message_operations.h"#include "ros/time.h"#include "ros/macros.h"#include "ros/assert.h"#include "ros/service_traits.h"#include "openraveros/Contact.h"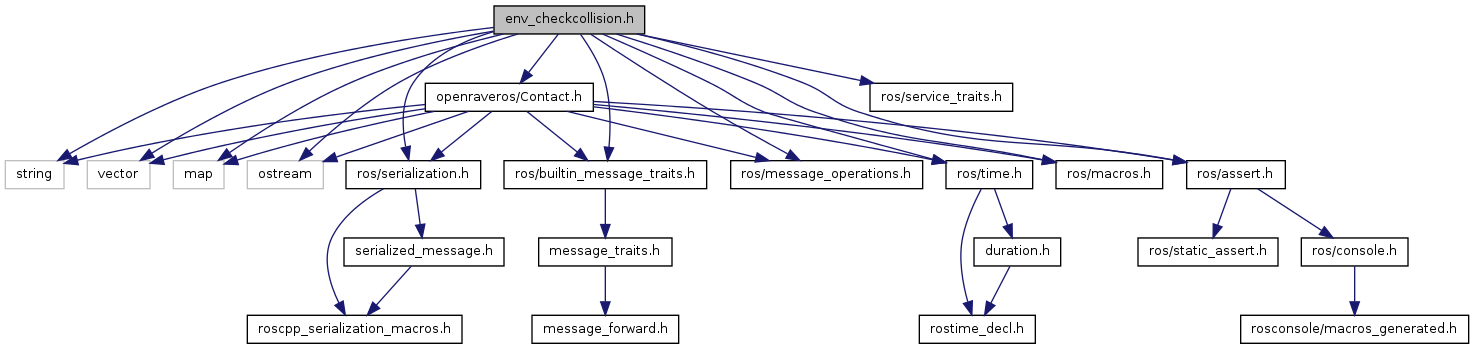
Go to the source code of this file.

