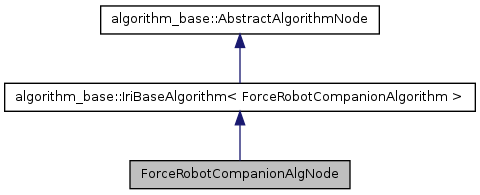
IRI ROS Specific Algorithm Class. More...
#include <force_robot_companion_alg_node.h>
Detailed Description
IRI ROS Specific Algorithm Class.
Definition at line 60 of file force_robot_companion_alg_node.h.
Constructor & Destructor Documentation
Constructor.
This constructor initializes specific class attributes and all ROS communications variables to enable message exchange.
Definition at line 9 of file force_robot_companion_alg_node.cpp.
Destructor.
This destructor frees all necessary dynamic memory allocated within this this class.
Definition at line 59 of file force_robot_companion_alg_node.cpp.
Member Function Documentation
| void ForceRobotCompanionAlgNode::addNodeDiagnostics | ( | void | ) | [protected, virtual] |
node add diagnostics
In this abstract function additional ROS diagnostics applied to the specific algorithms may be added.
Implements algorithm_base::IriBaseAlgorithm< ForceRobotCompanionAlgorithm >.
Definition at line 1128 of file force_robot_companion_alg_node.cpp.
| void ForceRobotCompanionAlgNode::clear_force_markers | ( | ) | [private] |
Definition at line 610 of file force_robot_companion_alg_node.cpp.
| void ForceRobotCompanionAlgNode::dest_callback | ( | const geometry_msgs::PoseStamped::ConstPtr & | msg | ) | [private] |
Definition at line 839 of file force_robot_companion_alg_node.cpp.
| void ForceRobotCompanionAlgNode::init_node | ( | ) | [private] |
Definition at line 168 of file force_robot_companion_alg_node.cpp.
| void ForceRobotCompanionAlgNode::joy_callback | ( | const sensor_msgs::Joy::ConstPtr & | msg | ) | [private] |
Definition at line 852 of file force_robot_companion_alg_node.cpp.
| void ForceRobotCompanionAlgNode::laser_callback | ( | const sensor_msgs::LaserScan::ConstPtr & | msg | ) | [private] |
Definition at line 764 of file force_robot_companion_alg_node.cpp.
| void ForceRobotCompanionAlgNode::mainNodeThread | ( | void | ) | [protected, virtual] |
main node thread
This is the main thread node function. Code written here will be executed in every node loop while the algorithm is on running state. Loop frequency can be tuned by modifying loop_rate attribute.
Here data related to the process loop or to ROS topics (mainly data structs related to the MSG and SRV files) must be updated. ROS publisher objects must publish their data in this process. ROS client servers may also request data to the corresponding server topics.
Implements algorithm_base::IriBaseAlgorithm< ForceRobotCompanionAlgorithm >.
Definition at line 65 of file force_robot_companion_alg_node.cpp.
| void ForceRobotCompanionAlgNode::move_baseActive | ( | ) | [private] |
Definition at line 1026 of file force_robot_companion_alg_node.cpp.
| void ForceRobotCompanionAlgNode::move_baseDone | ( | const actionlib::SimpleClientGoalState & | state, |
| const move_base_msgs::MoveBaseResultConstPtr & | result | ||
| ) | [private] |
Definition at line 1016 of file force_robot_companion_alg_node.cpp.
| void ForceRobotCompanionAlgNode::move_baseFeedback | ( | const move_base_msgs::MoveBaseFeedbackConstPtr & | feedback | ) | [private] |
Definition at line 1031 of file force_robot_companion_alg_node.cpp.
| void ForceRobotCompanionAlgNode::move_baseMakeActionRequest | ( | ) | [private] |
Definition at line 1049 of file force_robot_companion_alg_node.cpp.
| void ForceRobotCompanionAlgNode::node_config_update | ( | Config & | config, |
| uint32_t | level | ||
| ) | [protected, virtual] |
dynamic reconfigure server callback
This method is called whenever a new configuration is received through the dynamic reconfigure. The derivated generic algorithm class must implement it.
- Parameters:
-
config an object with new configuration from all algorithm parameters defined in the config file. level integer referring the level in which the configuration has been changed.
Implements algorithm_base::IriBaseAlgorithm< ForceRobotCompanionAlgorithm >.
Definition at line 1071 of file force_robot_companion_alg_node.cpp.
| void ForceRobotCompanionAlgNode::tracks_callback | ( | const iri_perception_msgs::peopleTrackingArray::ConstPtr & | msg | ) | [private] |
Definition at line 924 of file force_robot_companion_alg_node.cpp.
| void ForceRobotCompanionAlgNode::vis_destinations | ( | ) | [private] |
Definition at line 649 of file force_robot_companion_alg_node.cpp.
| void ForceRobotCompanionAlgNode::vis_intentionality_prediction | ( | ) | [private] |
Definition at line 621 of file force_robot_companion_alg_node.cpp.
| void ForceRobotCompanionAlgNode::vis_predictions | ( | ) | [private] |
Definition at line 730 of file force_robot_companion_alg_node.cpp.
| void ForceRobotCompanionAlgNode::vis_trajectories | ( | ) | [private] |
Definition at line 336 of file force_robot_companion_alg_node.cpp.
Member Data Documentation
Definition at line 65 of file force_robot_companion_alg_node.h.
Definition at line 64 of file force_robot_companion_alg_node.h.
visualization_msgs::Marker ForceRobotCompanionAlgNode::dest_marker_ [private] |
Definition at line 87 of file force_robot_companion_alg_node.h.
CMutex ForceRobotCompanionAlgNode::dest_mutex_ [private] |
Definition at line 105 of file force_robot_companion_alg_node.h.
Definition at line 103 of file force_robot_companion_alg_node.h.
string ForceRobotCompanionAlgNode::destination_map_path_ [private] |
Definition at line 142 of file force_robot_companion_alg_node.h.
Definition at line 80 of file force_robot_companion_alg_node.h.
Sforce ForceRobotCompanionAlgNode::f1_ [private] |
Definition at line 135 of file force_robot_companion_alg_node.h.
Sforce ForceRobotCompanionAlgNode::f2_ [private] |
Definition at line 135 of file force_robot_companion_alg_node.h.
Sforce ForceRobotCompanionAlgNode::f3_ [private] |
Definition at line 135 of file force_robot_companion_alg_node.h.
Sforce ForceRobotCompanionAlgNode::f4_ [private] |
Definition at line 135 of file force_robot_companion_alg_node.h.
Sforce ForceRobotCompanionAlgNode::f5_ [private] |
Definition at line 135 of file force_robot_companion_alg_node.h.
Sforce ForceRobotCompanionAlgNode::f_ [private] |
Definition at line 135 of file force_robot_companion_alg_node.h.
visualization_msgs::Marker ForceRobotCompanionAlgNode::force_goal2_marker_ [private] |
Definition at line 90 of file force_robot_companion_alg_node.h.
visualization_msgs::Marker ForceRobotCompanionAlgNode::force_goal_marker_ [private] |
Definition at line 90 of file force_robot_companion_alg_node.h.
visualization_msgs::Marker ForceRobotCompanionAlgNode::force_int_person_marker_ [private] |
Definition at line 90 of file force_robot_companion_alg_node.h.
visualization_msgs::Marker ForceRobotCompanionAlgNode::force_int_robot_marker_ [private] |
Definition at line 90 of file force_robot_companion_alg_node.h.
string ForceRobotCompanionAlgNode::force_map_path_ [private] |
Definition at line 142 of file force_robot_companion_alg_node.h.
visualization_msgs::Marker ForceRobotCompanionAlgNode::force_marker_ [private] |
Definition at line 90 of file force_robot_companion_alg_node.h.
visualization_msgs::Marker ForceRobotCompanionAlgNode::force_obstacle_laser_marker_ [private] |
Definition at line 90 of file force_robot_companion_alg_node.h.
visualization_msgs::Marker ForceRobotCompanionAlgNode::force_obstacle_map_marker_ [private] |
Definition at line 90 of file force_robot_companion_alg_node.h.
geometry_msgs::PointStamped ForceRobotCompanionAlgNode::force_param_msg_ [private] |
Definition at line 73 of file force_robot_companion_alg_node.h.
Definition at line 72 of file force_robot_companion_alg_node.h.
Definition at line 78 of file force_robot_companion_alg_node.h.
CMutex ForceRobotCompanionAlgNode::joy_mutex_ [private] |
Definition at line 108 of file force_robot_companion_alg_node.h.
Definition at line 106 of file force_robot_companion_alg_node.h.
CMutex ForceRobotCompanionAlgNode::laser_mutex_ [private] |
Definition at line 102 of file force_robot_companion_alg_node.h.
double ForceRobotCompanionAlgNode::laser_radi_ [private] |
Definition at line 143 of file force_robot_companion_alg_node.h.
Definition at line 100 of file force_robot_companion_alg_node.h.
visualization_msgs::MarkerArray ForceRobotCompanionAlgNode::MarkerArray_destinations_msg_ [private] |
Definition at line 81 of file force_robot_companion_alg_node.h.
visualization_msgs::MarkerArray ForceRobotCompanionAlgNode::MarkerArray_forces_msg_ [private] |
Definition at line 79 of file force_robot_companion_alg_node.h.
visualization_msgs::MarkerArray ForceRobotCompanionAlgNode::MarkerArray_predictions_msg_ [private] |
Definition at line 83 of file force_robot_companion_alg_node.h.
visualization_msgs::MarkerArray ForceRobotCompanionAlgNode::MarkerArray_trajectories_msg_ [private] |
Definition at line 77 of file force_robot_companion_alg_node.h.
actionlib::SimpleActionClient<move_base_msgs::MoveBaseAction> ForceRobotCompanionAlgNode::move_base_client_ [private] |
Definition at line 121 of file force_robot_companion_alg_node.h.
Definition at line 122 of file force_robot_companion_alg_node.h.
Definition at line 136 of file force_robot_companion_alg_node.h.
int ForceRobotCompanionAlgNode::nearest_target_ [private] |
Definition at line 141 of file force_robot_companion_alg_node.h.
float ForceRobotCompanionAlgNode::node_hz_ [private] |
Definition at line 129 of file force_robot_companion_alg_node.h.
double ForceRobotCompanionAlgNode::param_f1_ [private] |
Definition at line 137 of file force_robot_companion_alg_node.h.
double ForceRobotCompanionAlgNode::param_f2_ [private] |
Definition at line 137 of file force_robot_companion_alg_node.h.
double ForceRobotCompanionAlgNode::param_f3_ [private] |
Definition at line 137 of file force_robot_companion_alg_node.h.
Definition at line 67 of file force_robot_companion_alg_node.h.
Definition at line 66 of file force_robot_companion_alg_node.h.
Cforce_reactive_robot_companion ForceRobotCompanionAlgNode::pred_ [private] |
Definition at line 128 of file force_robot_companion_alg_node.h.
visualization_msgs::Marker ForceRobotCompanionAlgNode::pred_marker_ [private] |
Definition at line 88 of file force_robot_companion_alg_node.h.
Definition at line 82 of file force_robot_companion_alg_node.h.
std::vector<int> ForceRobotCompanionAlgNode::prev_buttons_ [private] |
Definition at line 138 of file force_robot_companion_alg_node.h.
Definition at line 139 of file force_robot_companion_alg_node.h.
SpointV_cov ForceRobotCompanionAlgNode::robot_desired_position_ [private] |
Definition at line 134 of file force_robot_companion_alg_node.h.
std::string ForceRobotCompanionAlgNode::robot_frame_ [private] |
Definition at line 130 of file force_robot_companion_alg_node.h.
visualization_msgs::Marker ForceRobotCompanionAlgNode::robot_marker_ [private] |
Definition at line 85 of file force_robot_companion_alg_node.h.
geometry_msgs::PointStamped ForceRobotCompanionAlgNode::robot_position_msg_ [private] |
Definition at line 71 of file force_robot_companion_alg_node.h.
Definition at line 70 of file force_robot_companion_alg_node.h.
bool ForceRobotCompanionAlgNode::robot_sim_ [private] |
Definition at line 136 of file force_robot_companion_alg_node.h.
bool ForceRobotCompanionAlgNode::robot_stop_ [private] |
Definition at line 136 of file force_robot_companion_alg_node.h.
double ForceRobotCompanionAlgNode::robot_x_ini_ [private] |
Definition at line 146 of file force_robot_companion_alg_node.h.
double ForceRobotCompanionAlgNode::robot_y_ini_ [private] |
Definition at line 146 of file force_robot_companion_alg_node.h.
SpointV_cov ForceRobotCompanionAlgNode::target_followed_pose_ [private] |
Definition at line 134 of file force_robot_companion_alg_node.h.
std::string ForceRobotCompanionAlgNode::target_frame_ [private] |
Definition at line 130 of file force_robot_companion_alg_node.h.
visualization_msgs::Marker ForceRobotCompanionAlgNode::target_marker_ [private] |
Definition at line 86 of file force_robot_companion_alg_node.h.
geometry_msgs::PointStamped ForceRobotCompanionAlgNode::target_person_position_msg_ [private] |
Definition at line 69 of file force_robot_companion_alg_node.h.
Definition at line 68 of file force_robot_companion_alg_node.h.
visualization_msgs::Marker ForceRobotCompanionAlgNode::text_marker_ [private] |
Definition at line 89 of file force_robot_companion_alg_node.h.
Definition at line 131 of file force_robot_companion_alg_node.h.
Definition at line 131 of file force_robot_companion_alg_node.h.
CMutex ForceRobotCompanionAlgNode::tracks_mutex_ [private] |
Definition at line 111 of file force_robot_companion_alg_node.h.
Definition at line 109 of file force_robot_companion_alg_node.h.
visualization_msgs::Marker ForceRobotCompanionAlgNode::traj_marker_ [private] |
Definition at line 85 of file force_robot_companion_alg_node.h.
visualization_msgs::Marker ForceRobotCompanionAlgNode::traj_robot_marker_ [private] |
Definition at line 85 of file force_robot_companion_alg_node.h.
Definition at line 76 of file force_robot_companion_alg_node.h.
geometry_msgs::Twist ForceRobotCompanionAlgNode::Twist_msg_ [private] |
Definition at line 75 of file force_robot_companion_alg_node.h.
Definition at line 136 of file force_robot_companion_alg_node.h.
Definition at line 74 of file force_robot_companion_alg_node.h.
The documentation for this class was generated from the following files: