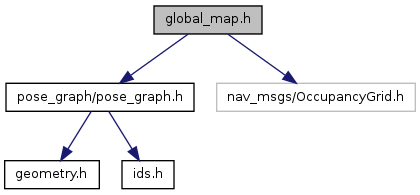
Include dependency graph for global_map.h:
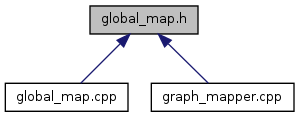
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | graph_slam |
Functions | |
| nav_msgs::OccupancyGrid::Ptr | graph_slam::generateGlobalMap (const pose_graph::PoseGraph &graph, const pose_graph::NodePoseMap &opt_poses, const double resolution) |
Variables | |
| const double | graph_slam::PADDING = 10.0 |
| We'll create the grid with this much padding around the provided poses. | |
Detailed Description
Generate a global occupancy grid given optimized poses and pose graph
Definition in file global_map.h.