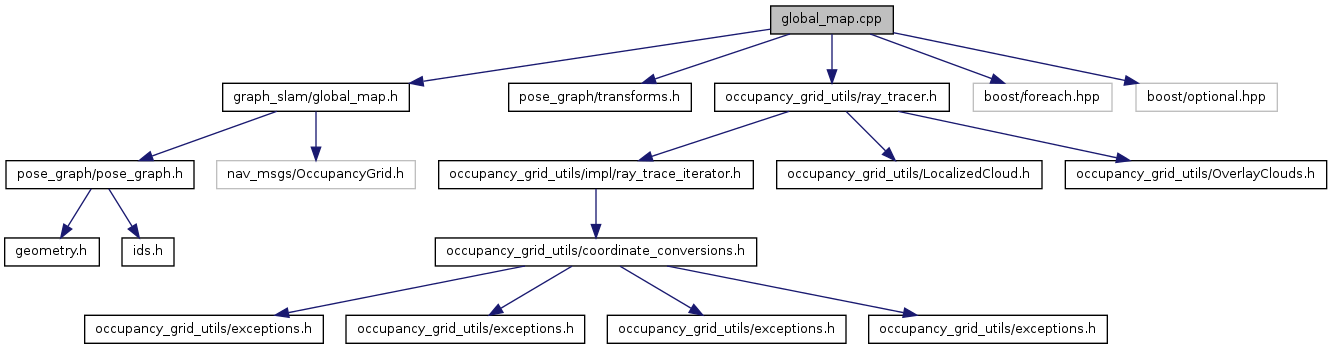
#include <graph_slam/global_map.h>#include <pose_graph/transforms.h>#include <occupancy_grid_utils/ray_tracer.h>#include <boost/foreach.hpp>#include <boost/optional.hpp>
Include dependency graph for global_map.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | graph_slam |
Functions | |
| nav_msgs::OccupancyGrid::Ptr | graph_slam::generateGlobalMap (const pose_graph::PoseGraph &graph, const pose_graph::NodePoseMap &opt_poses, const double resolution) |
| nm::MapMetaData | graph_slam::getGridBounds (const pg::NodePoseMap &poses, const double resolution) |