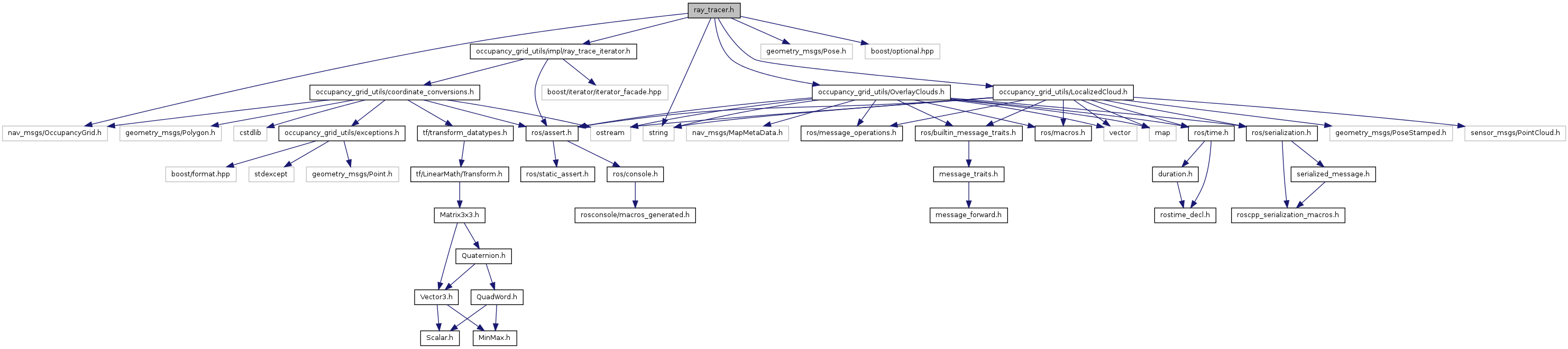
#include <occupancy_grid_utils/impl/ray_trace_iterator.h>#include <occupancy_grid_utils/LocalizedCloud.h>#include <occupancy_grid_utils/OverlayClouds.h>#include <nav_msgs/OccupancyGrid.h>#include <geometry_msgs/Pose.h>#include <boost/optional.hpp>#include <string>
Include dependency graph for ray_tracer.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| namespace | occupancy_grid_utils |
Typedefs | |
| typedef std::pair < RayTraceIterator, RayTraceIterator > | occupancy_grid_utils::RayTraceIterRange |
Functions | |
| void | occupancy_grid_utils::addCloud (OverlayClouds *overlay, LocalizedCloud::ConstPtr cloud) |
| Raytrace a cloud onto grid in overlay. | |
| OverlayClouds | occupancy_grid_utils::createCloudOverlay (const nav_msgs::MapMetaData &geometry, const std::string &frame_id, double occupancy_threshold=DEFAULT_OCCUPANCY_THRESHOLD, double max_distance=DEFAULT_MAX_DISTANCE, double min_pass_through=DEFAULT_MIN_PASS_THROUGH) |
| Create a cloud overlay object to which clouds can then be added The returned (ros message) object should only be accessed using the api below. | |
| nav_msgs::OccupancyGrid::Ptr | occupancy_grid_utils::getGrid (const OverlayClouds &overlay) |
| Get the current grid. It's fine to modify the returned object. | |
| nav_msgs::MapMetaData | occupancy_grid_utils::gridInfo (const OverlayClouds &overlay) |
| RayTraceIterRange | occupancy_grid_utils::rayTrace (const nav_msgs::MapMetaData &info, const geometry_msgs::Point &p1, const geometry_msgs::Point &p2, bool project_target_onto_grid=false, bool project_source_onto_grid=false) |
| Returns an iterator range over the cells on the line segment between two points (inclusive). | |
| void | occupancy_grid_utils::removeCloud (OverlayClouds *overlay, LocalizedCloud::ConstPtr cloud) |
| Effectively subtract a cloud (which was presumably previously added), by subtracting rather than adding counts, in overlay. | |
| void | occupancy_grid_utils::resetCounts (OverlayClouds *overlay) |
Variables | |
| const double | occupancy_grid_utils::DEFAULT_MAX_DISTANCE = 10.0 |
| Default max_distance for OverlayClouds. | |
| const double | occupancy_grid_utils::DEFAULT_MIN_PASS_THROUGH = 2 |
| Default min_pass_through for OverlayClouds. | |
| const double | occupancy_grid_utils::DEFAULT_OCCUPANCY_THRESHOLD = 0.1 |
| Default occupancy threshold for OverlayClouds. | |