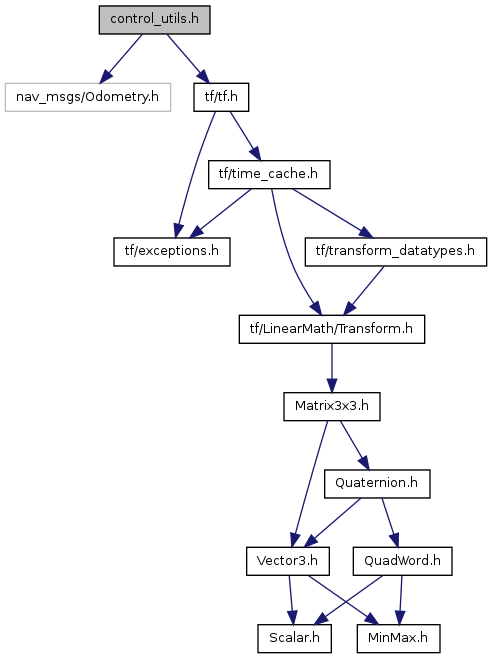
Include dependency graph for control_utils.h:
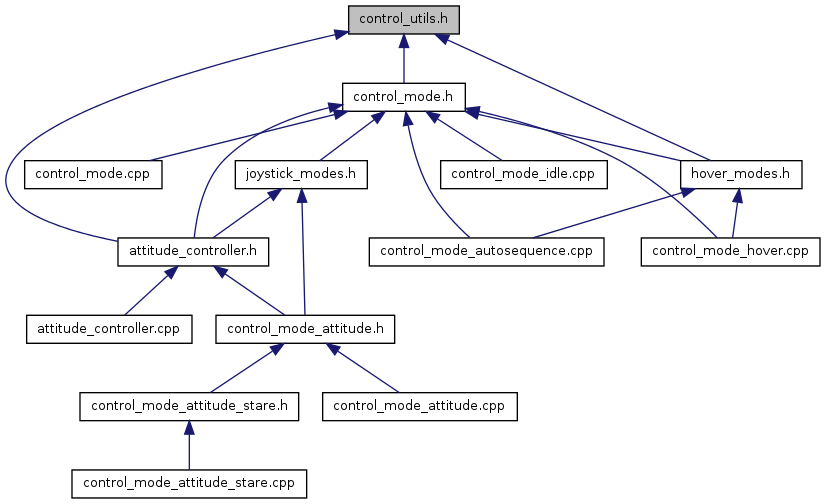
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Functions | |
| void | odom_msg_to_lin_vel (const nav_msgs::OdometryConstPtr &odom_msg, double &vx, double &vy, double &vz) |
| void | odom_msg_to_rotation_matrix (const nav_msgs::OdometryConstPtr &odom_msg, tf::Matrix3x3 &R_I_B) |
| void | odom_msg_to_xyz (const nav_msgs::OdometryConstPtr &odom_msg, double &x, double &y, double &z) |
| void | odom_msg_to_ypr (const nav_msgs::OdometryConstPtr &odom_msg, double &yaw, double &pitch, double &roll) |
Function Documentation
| void odom_msg_to_lin_vel | ( | const nav_msgs::OdometryConstPtr & | odom_msg, |
| double & | vx, | ||
| double & | vy, | ||
| double & | vz | ||
| ) | [inline] |
Definition at line 47 of file control_utils.h.
| void odom_msg_to_rotation_matrix | ( | const nav_msgs::OdometryConstPtr & | odom_msg, |
| tf::Matrix3x3 & | R_I_B | ||
| ) | [inline] |
Definition at line 63 of file control_utils.h.
| void odom_msg_to_xyz | ( | const nav_msgs::OdometryConstPtr & | odom_msg, |
| double & | x, | ||
| double & | y, | ||
| double & | z | ||
| ) | [inline] |
Definition at line 40 of file control_utils.h.
| void odom_msg_to_ypr | ( | const nav_msgs::OdometryConstPtr & | odom_msg, |
| double & | yaw, | ||
| double & | pitch, | ||
| double & | roll | ||
| ) | [inline] |
Definition at line 55 of file control_utils.h.