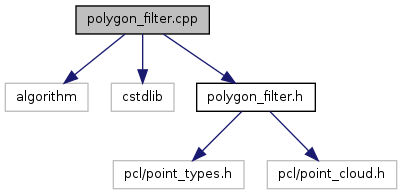
Go to the source code of this file.
Functions | |
| template<class point_type1 > | |
| pcl::PointCloud< point_type1 > | crop_by_polygon (const pcl::PointCloud< point_type1 > &cropping_polygon, const pcl::PointCloud< point_type1 > &cloud_to_crop, int x, int y, bool invert) |
| Crops a pointcloud in 2D. x and y determine the dimensions to use. | |
| void | cropping_test () |
| template<class point_type1 > | |
| bool | point_inside_polygon (const pcl::PointCloud< point_type1 > &cropping_polygon, const point_type1 &query_point, int x, int y) |
| pcl::PointCloud<point_type1> crop_by_polygon | ( | const pcl::PointCloud< point_type1 > & | cropping_polygon, |
| const pcl::PointCloud< point_type1 > & | cloud_to_crop, | ||
| int | x, | ||
| int | y, | ||
| bool | invert | ||
| ) |
Crops a pointcloud in 2D. x and y determine the dimensions to use.
Definition at line 58 of file polygon_filter.cpp.
| void cropping_test | ( | ) |
Definition at line 73 of file polygon_filter.cpp.
| bool point_inside_polygon | ( | const pcl::PointCloud< point_type1 > & | cropping_polygon, |
| const point_type1 & | query_point, | ||
| int | x, | ||
| int | y | ||
| ) |
Determines whether a point is inside a 2D polygon. x and y determine the dimensions to use This is a variation of the algorithm at http://paulbourke.net/geometry/insidepoly/ point_type2 needs only provide the data[] member, regardless of fancy stuff in point_type1
Definition at line 8 of file polygon_filter.cpp.

