#include <format_controllers.hpp>
Protected Member Functions | |
| virtual bool | initImpl (usb_cam_hardware_interface::PacketInterface *hw, ros::NodeHandle &root_nh, ros::NodeHandle &controller_nh) |
| virtual void | startingImpl (const ros::Time &time) |
| virtual void | stoppingImpl (const ros::Time &time) |
| virtual void | updateImpl (const ros::Time &time, const ros::Duration &period) |
 Protected Member Functions inherited from controller_interface::Controller< usb_cam_hardware_interface::PacketInterface > Protected Member Functions inherited from controller_interface::Controller< usb_cam_hardware_interface::PacketInterface > | |
| std::string | getHardwareInterfaceType () const |
| bool | initRequest (hardware_interface::RobotHW *robot_hw, ros::NodeHandle &root_nh, ros::NodeHandle &controller_nh, ClaimedResources &claimed_resources) override |
Private Attributes | |
| int | height_ |
| image_transport::Publisher | publisher_ |
| int | width_ |
Additional Inherited Members | |
| Public Types inherited from controller_interface::ControllerBase | |
| typedef std::vector< hardware_interface::InterfaceResources > | ClaimedResources |
| enum | ControllerState { ControllerState::CONSTRUCTED, ControllerState::INITIALIZED, ControllerState::RUNNING, ControllerState::STOPPED, ControllerState::WAITING, ControllerState::ABORTED } |
| Public Attributes inherited from controller_interface::ControllerBase | |
| ControllerState | state_ |
| Protected Attributes inherited from usb_cam_controllers::SimplePacketController | |
| usb_cam_hardware_interface::PacketHandle | packet_iface_ |
Detailed Description
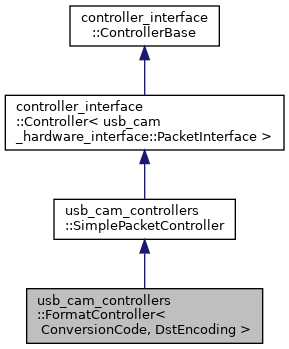
template<cv::ColorConversionCodes ConversionCode, const std::string * DstEncoding>
class usb_cam_controllers::FormatController< ConversionCode, DstEncoding >
Definition at line 23 of file format_controllers.hpp.
Constructor & Destructor Documentation
◆ FormatController()
|
inline |
Definition at line 25 of file format_controllers.hpp.
◆ ~FormatController()
|
inlinevirtual |
Definition at line 27 of file format_controllers.hpp.
Member Function Documentation
◆ initImpl()
|
inlineprotectedvirtual |
Implements usb_cam_controllers::SimplePacketController.
Definition at line 30 of file format_controllers.hpp.
◆ startingImpl()
|
inlineprotectedvirtual |
Implements usb_cam_controllers::SimplePacketController.
Definition at line 41 of file format_controllers.hpp.
◆ stoppingImpl()
|
inlineprotectedvirtual |
Implements usb_cam_controllers::SimplePacketController.
Definition at line 64 of file format_controllers.hpp.
◆ updateImpl()
|
inlineprotectedvirtual |
Implements usb_cam_controllers::SimplePacketController.
Definition at line 45 of file format_controllers.hpp.
Member Data Documentation
◆ height_
|
private |
Definition at line 69 of file format_controllers.hpp.
◆ publisher_
|
private |
Definition at line 71 of file format_controllers.hpp.
◆ width_
|
private |
Definition at line 69 of file format_controllers.hpp.
The documentation for this class was generated from the following file: