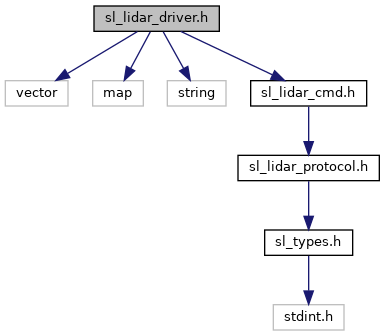
Include dependency graph for sl_lidar_driver.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | sl::IChannel |
| class | sl::ILidarDriver |
| class | sl::ISerialPortChannel |
| struct | sl::LidarMotorInfo |
| struct | sl::LidarScanMode |
| struct | sl::Result< T > |
| struct | sl::SlamtecLidarTimingDesc |
Namespaces | |
| sl | |
Macros | |
| #define | DEPRECATED(func) func |
| #define | DEPRECATED_WARN(fn, replacement) |
Enumerations | |
| enum | sl::ChannelType { sl::CHANNEL_TYPE_SERIALPORT = 0x0, sl::CHANNEL_TYPE_TCP = 0x1, sl::CHANNEL_TYPE_UDP = 0x2 } |
| enum | sl::LIDARInterfaceType { sl::LIDAR_INTERFACE_UART = 0, sl::LIDAR_INTERFACE_ETHERNET = 1, sl::LIDAR_INTERFACE_USB = 2, sl::LIDAR_INTERFACE_CANBUS = 5, sl::LIDAR_INTERFACE_UNKNOWN = 0xFFFF } |
| enum | sl::LIDARMajorType { sl::LIDAR_MAJOR_TYPE_UNKNOWN = 0, sl::LIDAR_MAJOR_TYPE_A_SERIES = 1, sl::LIDAR_MAJOR_TYPE_S_SERIES = 2, sl::LIDAR_MAJOR_TYPE_T_SERIES = 3, sl::LIDAR_MAJOR_TYPE_M_SERIES = 4, sl::LIDAR_MAJOR_TYPE_C_SERIES = 6 } |
| enum | sl::LIDARTechnologyType { sl::LIDAR_TECHNOLOGY_UNKNOWN = 0, sl::LIDAR_TECHNOLOGY_TRIANGULATION = 1, sl::LIDAR_TECHNOLOGY_DTOF = 2, sl::LIDAR_TECHNOLOGY_ETOF = 3, sl::LIDAR_TECHNOLOGY_FMCW = 4 } |
| enum | sl::MotorCtrlSupport { sl::MotorCtrlSupportNone = 0, sl::MotorCtrlSupportPwm = 1, sl::MotorCtrlSupportRpm = 2 } |
Functions | |
| Result< ILidarDriver * > | sl::createLidarDriver () |
| Result< IChannel * > | sl::createSerialPortChannel (const std::string &device, int baudrate) |
| Result< IChannel * > | sl::createTcpChannel (const std::string &ip, int port) |
| Result< IChannel * > | sl::createUdpChannel (const std::string &ip, int port) |
Variables | |
| struct sl::LidarScanMode | sl::__attribute__ |
Macro Definition Documentation
◆ DEPRECATED
| #define DEPRECATED | ( | func | ) | func |
Definition at line 49 of file sl_lidar_driver.h.
◆ DEPRECATED_WARN
| #define DEPRECATED_WARN | ( | fn, | |
| replacement | |||
| ) |
Value:
do { \
static bool __shown__ = false; \
if (!__shown__) { \
printDeprecationWarn(fn, replacement); \
__shown__ = true; \
} \
} while (0)
Definition at line 61 of file sl_lidar_driver.h.