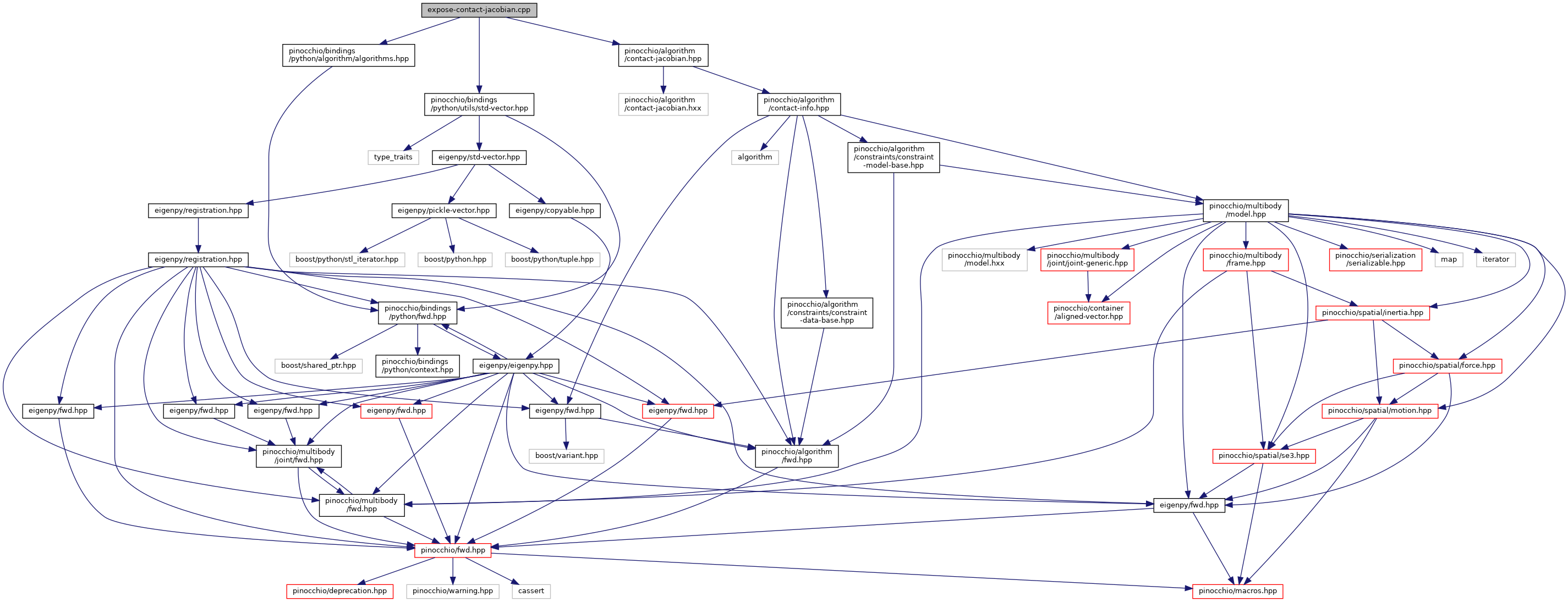
#include "pinocchio/bindings/python/algorithm/algorithms.hpp"#include "pinocchio/algorithm/contact-jacobian.hpp"#include "pinocchio/bindings/python/utils/std-vector.hpp"#include "pinocchio/bindings/python/utils/model-checker.hpp"
Include dependency graph for expose-contact-jacobian.cpp:
Go to the source code of this file.
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
| pinocchio::python | |
Functions | |
| void | pinocchio::python::exposeContactJacobian () |
| static context::MatrixXs | pinocchio::python::getConstraintJacobian_proxy (const context::Model &model, const context::Data &data, const context::RigidConstraintModel &contact_model, context::RigidConstraintData &contact_data) |
| static context::MatrixXs | pinocchio::python::getConstraintsJacobian_proxy (const context::Model &model, const context::Data &data, const RigidConstraintModelVector &contact_models, RigidConstraintDataVector &contact_datas) |
| typedef | pinocchio::python::PINOCCHIO_STD_VECTOR_WITH_EIGEN_ALLOCATOR (context::RigidConstraintData) RigidConstraintDataVector |
| typedef | pinocchio::python::PINOCCHIO_STD_VECTOR_WITH_EIGEN_ALLOCATOR (context::RigidConstraintModel) RigidConstraintModelVector |