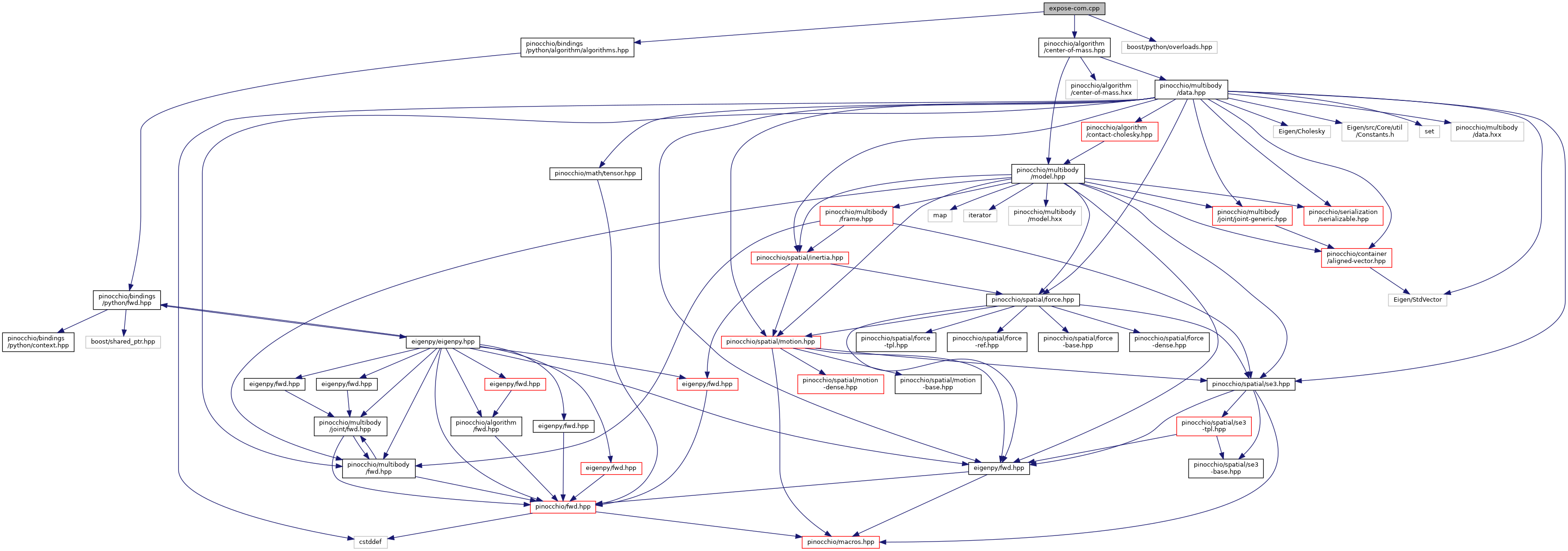
#include "pinocchio/bindings/python/algorithm/algorithms.hpp"#include "pinocchio/algorithm/center-of-mass.hpp"#include "pinocchio/bindings/python/utils/model-checker.hpp"#include <boost/python/overloads.hpp>
Include dependency graph for expose-com.cpp:
Go to the source code of this file.
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
| pinocchio::python | |
Functions | |
| static context::SE3::Vector3 | pinocchio::python::com_0_proxy (const context::Model &model, context::Data &data, const context::VectorXs &q, bool computeSubtreeComs=true) |
| static context::SE3::Vector3 | pinocchio::python::com_1_proxy (const context::Model &model, context::Data &data, const context::VectorXs &q, const context::VectorXs &v, bool computeSubtreeComs=true) |
| static context::SE3::Vector3 | pinocchio::python::com_2_proxy (const context::Model &model, context::Data &data, const context::VectorXs &q, const context::VectorXs &v, const context::VectorXs &a, bool computeSubtreeComs=true) |
| static const context::Data::Vector3 & | pinocchio::python::com_default_proxy (const context::Model &model, context::Data &data, bool computeSubtreeComs=true) |
| static const context::Data::Vector3 & | pinocchio::python::com_level_proxy (const context::Model &model, context::Data &data, KinematicLevel kinematic_level, bool computeSubtreeComs=true) |
| void | pinocchio::python::exposeCOM () |
| static context::Data::Matrix3x | pinocchio::python::get_jacobian_subtree_com_proxy (const context::Model &model, context::Data &data, context::Model::JointIndex jointId) |
| static context::Data::Matrix3x | pinocchio::python::jacobian_subtree_com_kinematics_proxy (const context::Model &model, context::Data &data, const context::VectorXs &q, context::Model::JointIndex jointId) |
| static context::Data::Matrix3x | pinocchio::python::jacobian_subtree_com_proxy (const context::Model &model, context::Data &data, context::Model::JointIndex jointId) |