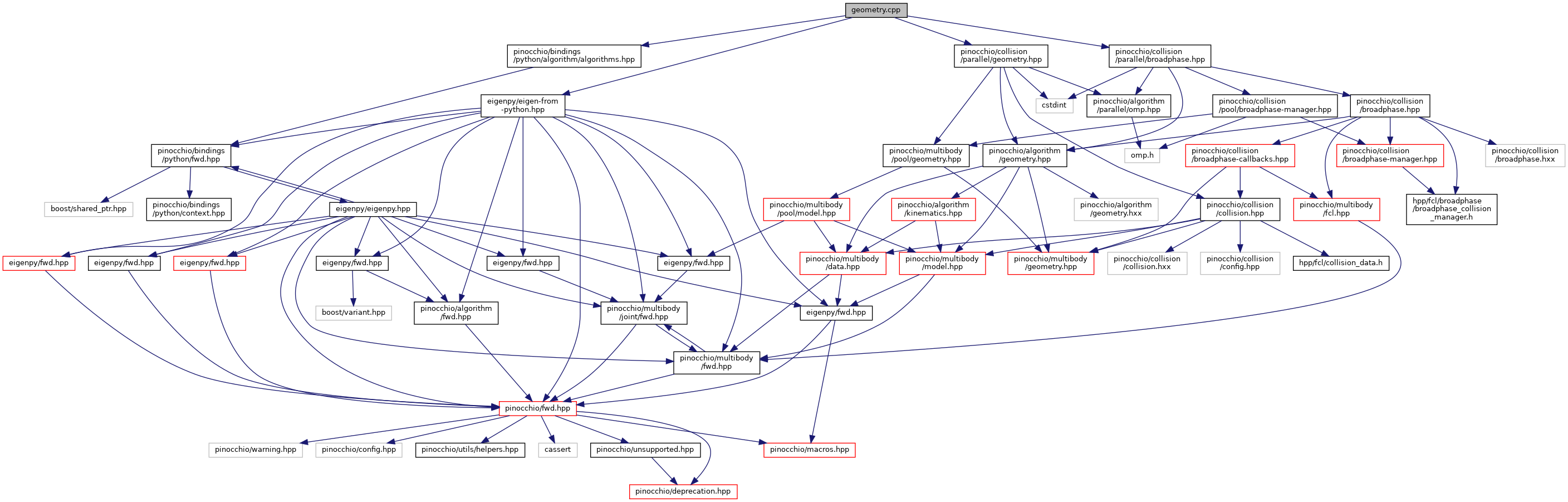
#include "pinocchio/bindings/python/algorithm/algorithms.hpp"#include "pinocchio/collision/parallel/geometry.hpp"#include "pinocchio/collision/parallel/broadphase.hpp"#include <eigenpy/eigen-from-python.hpp>
Include dependency graph for bindings/python/collision/parallel/geometry.cpp:
Go to the source code of this file.
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
| pinocchio::python | |
Functions | |
| static bool | pinocchio::python::computeCollisionsInParallel_full_proxy (const size_t num_threads, const Model &model, Data &data, const GeometryModel &geom_model, GeometryData &geom_data, const Eigen::VectorXd &q, const bool stopAtFirstCollision=false) |
| static VectorXb | pinocchio::python::computeCollisionsInParallel_pool_proxy (const int num_thread, GeometryPool &pool, const Eigen::MatrixXd &q, bool stopAtFirstCollisionInConfiguration=false, bool stopAtFirstCollisionInBatch=false) |
| static bool | pinocchio::python::computeCollisionsInParallel_proxy (const size_t num_threads, const GeometryModel &geom_model, GeometryData &geom_data, const bool stopAtFirstCollision=false) |
| void | pinocchio::python::exposeParallelGeometry () |