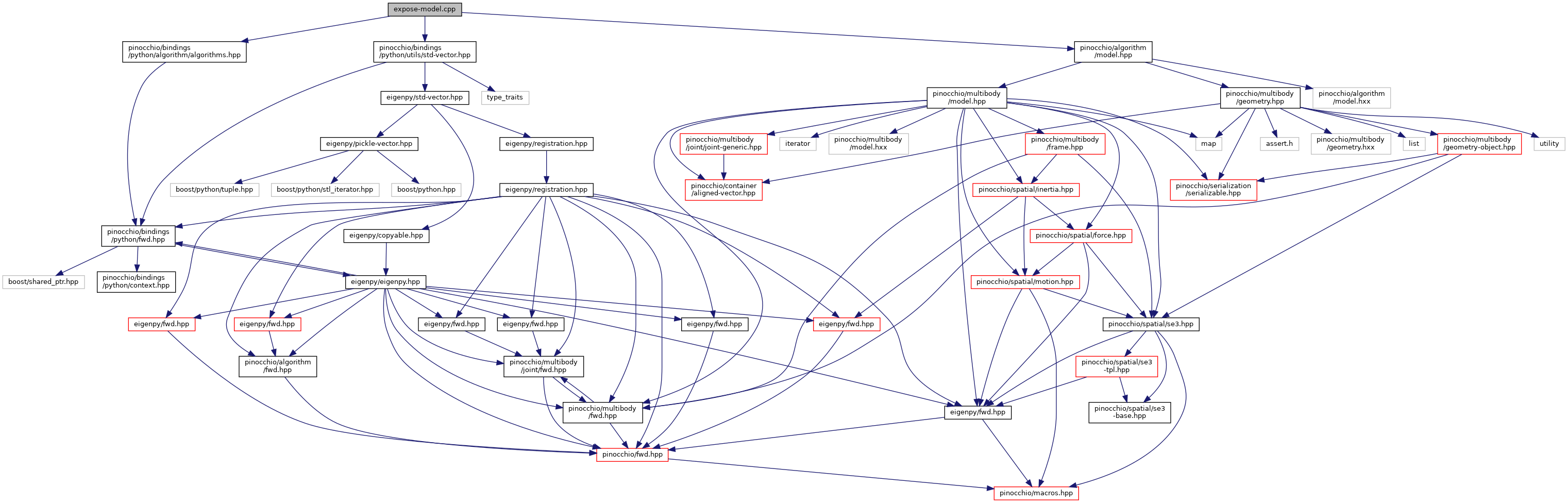
#include "pinocchio/bindings/python/algorithm/algorithms.hpp"#include "pinocchio/bindings/python/utils/std-vector.hpp"#include "pinocchio/algorithm/model.hpp"
Include dependency graph for algorithm/expose-model.cpp:
Go to the source code of this file.
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
| pinocchio::python | |
Functions | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| bp::tuple | pinocchio::python::appendModel_proxy (const ModelTpl< Scalar, Options, JointCollectionTpl > &modelA, const ModelTpl< Scalar, Options, JointCollectionTpl > &modelB, const GeometryModel &geomModelA, const GeometryModel &geomModelB, const FrameIndex frameInModelA, const SE3Tpl< Scalar, Options > &aMb) |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType > | |
| bp::tuple | pinocchio::python::buildReducedModel (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, const GeometryModel &geom_model, const std::vector< JointIndex > &list_of_joints_to_lock, const Eigen::MatrixBase< ConfigVectorType > &reference_configuration) |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl, typename ConfigVectorType > | |
| bp::tuple | pinocchio::python::buildReducedModel (const ModelTpl< Scalar, Options, JointCollectionTpl > &model, const std::vector< GeometryModel, Eigen::aligned_allocator< GeometryModel >> &list_of_geom_models, const std::vector< JointIndex > &list_of_joints_to_lock, const Eigen::MatrixBase< ConfigVectorType > &reference_configuration) |
| void | pinocchio::python::exposeModelAlgo () |
| bp::tuple | pinocchio::python::findCommonAncestor_proxy (const context::Model &model, const JointIndex joint1_id, const JointIndex joint2_id) |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| ModelTpl< Scalar, Options, JointCollectionTpl > | pinocchio::python::transformJointIntoMimic_proxy (const ModelTpl< Scalar, Options, JointCollectionTpl > &input_model, const JointIndex &index_mimicked, const JointIndex &index_mimicking, const Scalar &scaling, const Scalar &offset) |