A ROS controller for forwarding trajectories to a robot for interpolation. More...
#include <pass_through_controllers.h>
Classes | |
| struct | ActionDuration |
| Container for easy time management. More... | |
Public Types | |
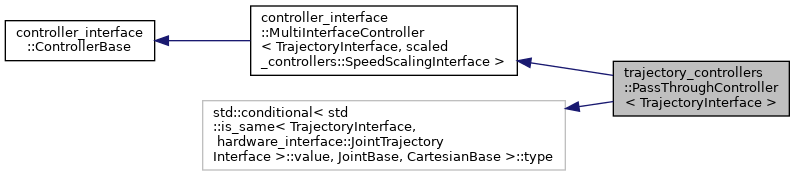
| using | Base = typename std::conditional< std::is_same< TrajectoryInterface, hardware_interface::JointTrajectoryInterface >::value, JointBase, CartesianBase >::type |
 Public Types inherited from controller_interface::ControllerBase Public Types inherited from controller_interface::ControllerBase | |
| typedef std::vector< hardware_interface::InterfaceResources > | ClaimedResources |
| enum | ControllerState { ControllerState::CONSTRUCTED, ControllerState::INITIALIZED, ControllerState::RUNNING, ControllerState::STOPPED, ControllerState::WAITING, ControllerState::ABORTED } |
Public Member Functions | |
| void | executeCB (const typename Base::GoalConstPtr &goal) |
| Callback method for new action goals. More... | |
| bool | init (hardware_interface::RobotHW *hw, ros::NodeHandle &root_nh, ros::NodeHandle &controller_nh) |
| PassThroughController () | |
| void | preemptCB () |
| Callback method for preempt requests. More... | |
| void | starting (const ros::Time &time) |
| void | stopping (const ros::Time &time) |
| void | update (const ros::Time &time, const ros::Duration &period) |
| Public Member Functions inherited from controller_interface::MultiInterfaceController< TrajectoryInterface, scaled_controllers::SpeedScalingInterface > | |
| virtual bool | init (hardware_interface::RobotHW *, ros::NodeHandle &) |
| MultiInterfaceController (bool allow_optional_interfaces=false) | |
| Public Member Functions inherited from controller_interface::ControllerBase | |
| virtual void | aborting (const ros::Time &) |
| virtual void | aborting (const ros::Time &) |
| bool | abortRequest (const ros::Time &time) |
| bool | abortRequest (const ros::Time &time) |
| ControllerBase ()=default | |
| ControllerBase (const ControllerBase &)=delete | |
| ControllerBase (ControllerBase &&)=delete | |
| bool | isAborted () const |
| bool | isAborted () const |
| bool | isInitialized () const |
| bool | isInitialized () const |
| bool | isRunning () const |
| bool | isRunning () const |
| bool | isStopped () const |
| bool | isStopped () const |
| bool | isWaiting () const |
| bool | isWaiting () const |
| ControllerBase & | operator= (const ControllerBase &)=delete |
| ControllerBase & | operator= (ControllerBase &&)=delete |
| bool | startRequest (const ros::Time &time) |
| bool | startRequest (const ros::Time &time) |
| bool | stopRequest (const ros::Time &time) |
| bool | stopRequest (const ros::Time &time) |
| void | updateRequest (const ros::Time &time, const ros::Duration &period) |
| void | updateRequest (const ros::Time &time, const ros::Duration &period) |
| virtual void | waiting (const ros::Time &) |
| virtual void | waiting (const ros::Time &) |
| bool | waitRequest (const ros::Time &time) |
| bool | waitRequest (const ros::Time &time) |
| virtual | ~ControllerBase ()=default |
Private Member Functions | |
| void | doneCB (const hardware_interface::ExecutionState &state) |
| Will get called upon finishing the forwarded trajectory. More... | |
| bool | isValid (const typename Base::GoalConstPtr &goal) |
| Check if follow trajectory goals are valid. More... | |
| bool | isValid (const typename Base::GoalConstPtr &goal) |
| bool | isValid (const typename Base::GoalConstPtr &goal) |
| void | monitorExecution (const typename Base::TrajectoryFeedback &feedback) |
| Monitor the trajectory execution. More... | |
| bool | withinTolerances (const TrajectoryPoint &error, const Tolerance &tolerances) |
| bool | withinTolerances (const typename Base::TrajectoryPoint &error, const typename Base::Tolerance &tolerances) |
| Check if tolerances are met. More... | |
| bool | withinTolerances (const typename Base::TrajectoryPoint &error, const typename Base::Tolerance &tolerances) |
Private Attributes | |
| ActionDuration | action_duration_ |
| std::unique_ptr< actionlib::SimpleActionServer< typename Base::FollowTrajectoryAction > > | action_server_ |
| std::atomic< bool > | done_ |
| Base::Tolerance | goal_tolerances_ |
| std::vector< std::string > | joint_names_ |
| Base::Tolerance | path_tolerances_ |
| std::unique_ptr< scaled_controllers::SpeedScalingHandle > | speed_scaling_ |
| TrajectoryInterface * | trajectory_interface_ |
Detailed Description
template<class TrajectoryInterface>
class trajectory_controllers::PassThroughController< TrajectoryInterface >
A ROS controller for forwarding trajectories to a robot for interpolation.
Instead of interpolating between the waypoints itself, this driver passes the complete trajectories down to the according HW interfaces, assuming that the driver's implementation makes use of whichever components are suitable for that specific robot.
This controller implements a simple action server that provides the common /follow_joint_trajectory or /follow_cartesian_trajectory action interface.
Users specify this controller in their .yaml files with:
- Template Parameters
-
TrajectoryInterface The type of trajectory interface used for this controller. Either hardware_interface::JointTrajectoryInterface or hardware_interface::CartesianTrajectoryInterface.
Definition at line 106 of file pass_through_controllers.h.
Member Typedef Documentation
◆ Base
| using trajectory_controllers::PassThroughController< TrajectoryInterface >::Base = typename std::conditional<std::is_same<TrajectoryInterface, hardware_interface::JointTrajectoryInterface>::value, JointBase, CartesianBase>::type |
Definition at line 125 of file pass_through_controllers.h.
Constructor & Destructor Documentation
◆ PassThroughController()
|
inline |
Definition at line 113 of file pass_through_controllers.h.
Member Function Documentation
◆ doneCB()
|
private |
Will get called upon finishing the forwarded trajectory.
Definition at line 322 of file pass_through_controllers.hpp.
◆ executeCB()
| void trajectory_controllers::PassThroughController< TrajectoryInterface >::executeCB | ( | const typename Base::GoalConstPtr & | goal | ) |
Callback method for new action goals.
This method calls the setGoal() method from the TrajectoryInterface. Implementers of the ROS-control HW can choose how the trajectory goal is forwarded to the robot for interpolation.
Things in detail:
- New goals are only accepted when the controller is running
- Switching the controller (stopping) cancels running goals
- The goal's success is monitored in update()
Further info on how the simple action server works is given here.
- Parameters
-
goal The trajectory goal
Definition at line 152 of file pass_through_controllers.hpp.
◆ init()
|
virtual |
Reimplemented from controller_interface::MultiInterfaceController< TrajectoryInterface, scaled_controllers::SpeedScalingInterface >.
Definition at line 41 of file pass_through_controllers.hpp.
◆ isValid() [1/3]
|
private |
Check if follow trajectory goals are valid.
- Parameters
-
goal The goal to check.
- Returns
- True if goal is valid, false otherwise
◆ isValid() [2/3]
|
private |
Definition at line 297 of file pass_through_controllers.hpp.
◆ isValid() [3/3]
|
private |
Definition at line 314 of file pass_through_controllers.hpp.
◆ monitorExecution()
|
private |
Monitor the trajectory execution.
- Parameters
-
feedback The feedback to use for evaluating tolerances
Definition at line 211 of file pass_through_controllers.hpp.
◆ preemptCB()
| void trajectory_controllers::PassThroughController< TrajectoryInterface >::preemptCB |
Callback method for preempt requests.
This method gets called on every preempt request that happens either directly upon a client request or indirectly when receiving a new goal while another is still active.
This method calls the setCancel() method from the TrajectoryInterface. The RobotHW should implement how this notification is handled by the robot vendor control.
Also check this info. on the simple action server's preemption policy:
Definition at line 201 of file pass_through_controllers.hpp.
◆ starting()
|
virtual |
Reimplemented from controller_interface::ControllerBase.
Definition at line 100 of file pass_through_controllers.hpp.
◆ stopping()
|
virtual |
Reimplemented from controller_interface::ControllerBase.
Definition at line 106 of file pass_through_controllers.hpp.
◆ update()
|
virtual |
Implements controller_interface::ControllerBase.
Definition at line 122 of file pass_through_controllers.hpp.
◆ withinTolerances() [1/3]
|
private |
Definition at line 221 of file pass_through_controllers.hpp.
◆ withinTolerances() [2/3]
|
private |
Check if tolerances are met.
- Parameters
-
error The error to check tolerances The tolerances to check against
- Returns
- False if any of the errors exceeds its tolerance, else true
◆ withinTolerances() [3/3]
|
private |
Definition at line 265 of file pass_through_controllers.hpp.
Member Data Documentation
◆ action_duration_
|
private |
Definition at line 218 of file pass_through_controllers.h.
◆ action_server_
|
private |
- Resource managed by RobotHW
Definition at line 224 of file pass_through_controllers.h.
◆ done_
|
private |
Definition at line 217 of file pass_through_controllers.h.
◆ goal_tolerances_
|
private |
Definition at line 222 of file pass_through_controllers.h.
◆ joint_names_
|
private |
Definition at line 220 of file pass_through_controllers.h.
◆ path_tolerances_
|
private |
Definition at line 221 of file pass_through_controllers.h.
◆ speed_scaling_
|
private |
Definition at line 219 of file pass_through_controllers.h.
◆ trajectory_interface_
|
private |
Definition at line 223 of file pass_through_controllers.h.
The documentation for this class was generated from the following files: