#include <Matcher.h>
Public Member Functions | |
| virtual void | initialize (const mrpt::containers::yaml ¶ms) |
| virtual bool | match (const metric_map_t &pcGlobal, const metric_map_t &pcLocal, const mrpt::poses::CPose3D &localPose, const MatchContext &mc, MatchState &ms, Pairings &out) const |
 Public Member Functions inherited from mp2p_icp::Parameterizable Public Member Functions inherited from mp2p_icp::Parameterizable | |
| ParameterSource * | attachedSource () |
| const ParameterSource * | attachedSource () const |
| virtual void | attachToParameterSource (ParameterSource &source) |
| void | checkAllParametersAreRealized () const |
| auto & | declaredParameters () |
| const auto & | declaredParameters () const |
| void | unrealizeParameters () |
| Mark all non-constant parameters as non-evaluated again. More... | |
Public Attributes | |
| bool | enabled = true |
| uint32_t | runFromIteration = 0 |
| uint32_t | runUpToIteration = 0 |
| 0: no limit More... | |
Protected Member Functions | |
| virtual bool | impl_match (const metric_map_t &pcGlobal, const metric_map_t &pcLocal, const mrpt::poses::CPose3D &localPose, const MatchContext &mc, MatchState &ms, Pairings &out) const =0 |
| Protected Member Functions inherited from mp2p_icp::Parameterizable | |
| void | parseAndDeclareParameter (const std::string &value, double &target) |
| void | parseAndDeclareParameter (const std::string &value, float &target) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| void | parseAndDeclareParameter (const std::string &value, uint32_t &target) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
Detailed Description
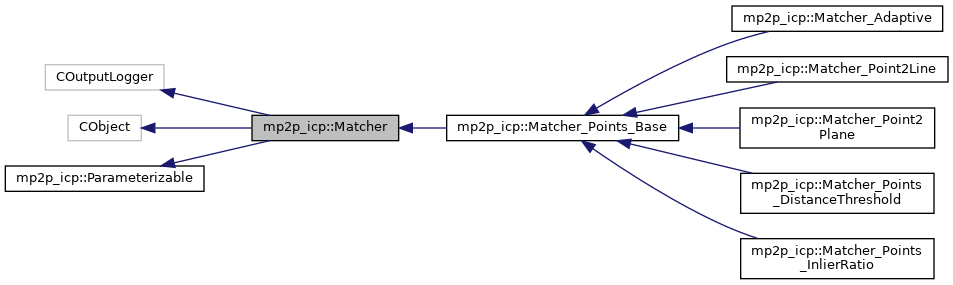
Pointcloud matching generic base class. Each "matcher" implementation takes a global ("reference") metric_map_t and another local ("mobile") metric_map_t which is assumed to be placed in a hypothetical SE(3) pose in the global frame, and generates pairings between the geometric entities (points, planes, etc.) of both groups.
Member Function Documentation
◆ impl_match()
|
protectedpure virtual |
- Returns
- true if the mather is actually invoked, false if disabled.
Implemented in mp2p_icp::Matcher_Points_Base.
◆ initialize()
|
virtual |
Check each derived class to see required and optional parameters.
Reimplemented in mp2p_icp::Matcher_Points_Base, mp2p_icp::Matcher_Adaptive, mp2p_icp::Matcher_Points_DistanceThreshold, mp2p_icp::Matcher_Point2Line, mp2p_icp::Matcher_Points_InlierRatio, and mp2p_icp::Matcher_Point2Plane.
Definition at line 20 of file mp2p_icp/src/Matcher.cpp.
◆ match()
|
virtual |
Finds correspondences between the two point clouds. "out" is not cleared, but new pairings added to it.
- Returns
- false if the matcher is disabled and was not actually run.
Definition at line 27 of file mp2p_icp/src/Matcher.cpp.
Member Data Documentation
◆ enabled
◆ runFromIteration
◆ runUpToIteration
| uint32_t mp2p_icp::Matcher::runUpToIteration = 0 |
The documentation for this class was generated from the following files: