#include <move_group_capability.h>
Definition at line 89 of file move_group_capability.h.
◆ MoveGroupCapability()
| move_group::MoveGroupCapability::MoveGroupCapability |
( |
const std::string & |
capability_name | ) |
|
|
inline |
◆ ~MoveGroupCapability()
| virtual move_group::MoveGroupCapability::~MoveGroupCapability |
( |
| ) |
|
|
inlinevirtual |
◆ clearRequestStartState()
◆ clearSceneRobotState()
| moveit_msgs::PlanningScene move_group::MoveGroupCapability::clearSceneRobotState |
( |
const moveit_msgs::PlanningScene & |
scene | ) |
const |
|
protected |
◆ convertToMsg() [1/3]
| void move_group::MoveGroupCapability::convertToMsg |
( |
const robot_trajectory::RobotTrajectoryPtr & |
trajectory, |
|
|
moveit_msgs::RobotState & |
first_state_msg, |
|
|
moveit_msgs::RobotTrajectory & |
trajectory_msg |
|
) |
| const |
|
protected |
◆ convertToMsg() [2/3]
| void move_group::MoveGroupCapability::convertToMsg |
( |
const std::vector< plan_execution::ExecutableTrajectory > & |
trajectory, |
|
|
moveit_msgs::RobotState & |
first_state_msg, |
|
|
moveit_msgs::RobotTrajectory & |
trajectory_msg |
|
) |
| const |
|
protected |
◆ convertToMsg() [3/3]
| void move_group::MoveGroupCapability::convertToMsg |
( |
const std::vector< plan_execution::ExecutableTrajectory > & |
trajectory, |
|
|
moveit_msgs::RobotState & |
first_state_msg, |
|
|
std::vector< moveit_msgs::RobotTrajectory > & |
trajectory_msg |
|
) |
| const |
|
protected |
◆ getActionResultString()
| std::string move_group::MoveGroupCapability::getActionResultString |
( |
const moveit_msgs::MoveItErrorCodes & |
error_code, |
|
|
bool |
planned_trajectory_empty, |
|
|
bool |
plan_only |
|
) |
| |
|
protected |
◆ getName()
| const std::string& move_group::MoveGroupCapability::getName |
( |
| ) |
const |
|
inline |
◆ initialize()
| virtual void move_group::MoveGroupCapability::initialize |
( |
| ) |
|
|
pure virtual |
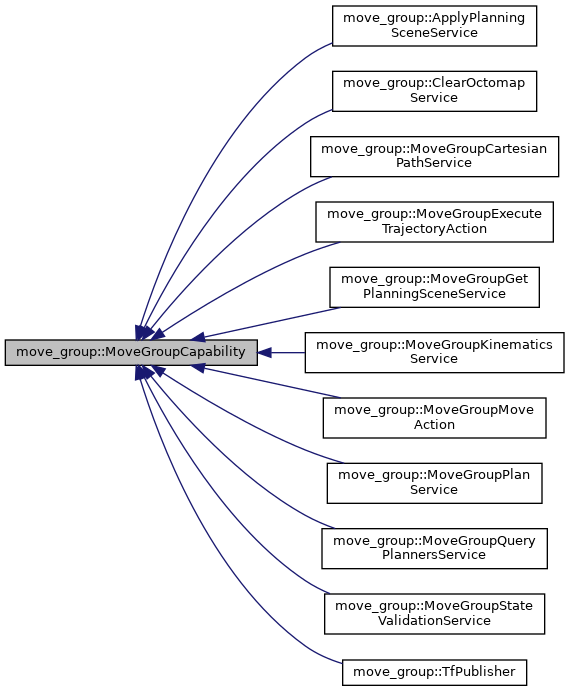
Implemented in move_group::MoveGroupExecuteTrajectoryAction, move_group::ApplyPlanningSceneService, move_group::MoveGroupMoveAction, move_group::MoveGroupQueryPlannersService, move_group::MoveGroupKinematicsService, move_group::TfPublisher, move_group::MoveGroupCartesianPathService, move_group::ClearOctomapService, move_group::MoveGroupPlanService, move_group::MoveGroupStateValidationService, and move_group::MoveGroupGetPlanningSceneService.
◆ performTransform()
| bool move_group::MoveGroupCapability::performTransform |
( |
geometry_msgs::PoseStamped & |
pose_msg, |
|
|
const std::string & |
target_frame |
|
) |
| const |
|
protected |
◆ resolvePlanningPipeline()
| planning_pipeline::PlanningPipelinePtr move_group::MoveGroupCapability::resolvePlanningPipeline |
( |
const std::string & |
pipeline_id | ) |
const |
|
protected |
◆ setContext()
| void move_group::MoveGroupCapability::setContext |
( |
const MoveGroupContextPtr & |
context | ) |
|
◆ stateToStr()
| std::string move_group::MoveGroupCapability::stateToStr |
( |
MoveGroupState |
state | ) |
const |
|
protected |
◆ capability_name_
| std::string move_group::MoveGroupCapability::capability_name_ |
|
protected |
◆ context_
| MoveGroupContextPtr move_group::MoveGroupCapability::context_ |
|
protected |
◆ node_handle_
◆ root_node_handle_
The documentation for this class was generated from the following files: