#include <gtest/gtest.h>#include <ros/ros.h>#include <moveit/collision_detection/collision_common.h>#include <moveit/robot_model/robot_model.h>#include <moveit/robot_state/robot_state.h>#include <moveit/utils/robot_model_test_utils.h>#include <moveit/collision_detection_fcl/collision_common.h>#include <moveit/collision_detection_fcl/collision_env_fcl.h>#include <urdf_parser/urdf_parser.h>#include <geometric_shapes/shape_operations.h>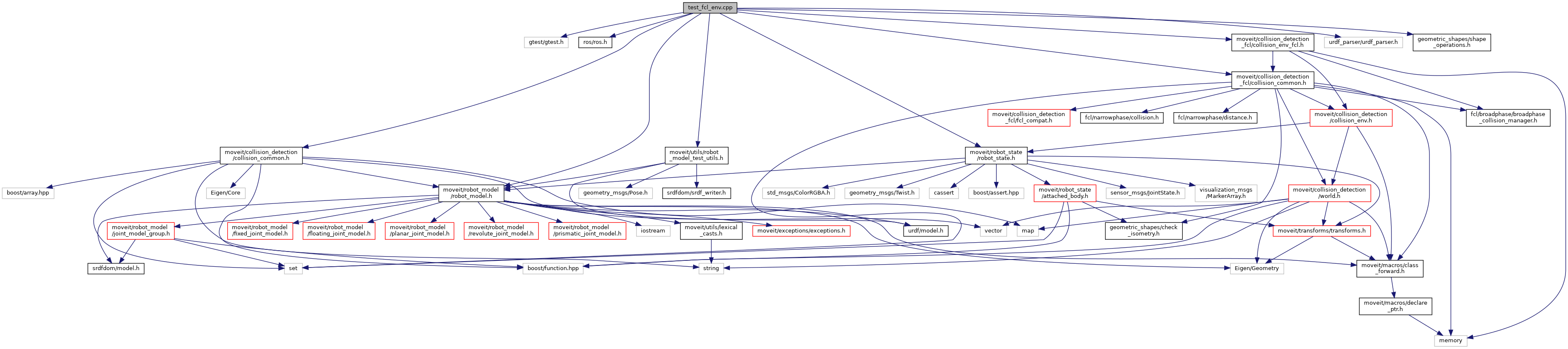
Go to the source code of this file.
Classes | |
| class | CollisionDetectionEnvTest |
Functions | |
| int | main (int argc, char **argv) |
| void | setToHome (moveit::core::RobotState &panda_state) |
| Brings the panda robot in user defined home position. More... | |
| TEST_F (CollisionDetectionEnvTest, DefaultNotInCollision) | |
| Tests the default values specified in the SRDF if they are collision free. More... | |
| TEST_F (CollisionDetectionEnvTest, DISABLED_ContinuousCollisionSelf) | |
| Continuous self collision checks of the robot. More... | |
| TEST_F (CollisionDetectionEnvTest, DISABLED_ContinuousCollisionWorld) | |
| Two similar robot poses are used as start and end pose of a continuous collision check. More... | |
| TEST_F (CollisionDetectionEnvTest, InitOK) | |
| Correct setup testing. More... | |
| TEST_F (CollisionDetectionEnvTest, LinksInCollision) | |
| A configuration where the robot should collide with itself. More... | |
| TEST_F (CollisionDetectionEnvTest, PaddingTest) | |
| Tests the padding through expanding the link geometry in such a way that a collision occurs. More... | |
| TEST_F (CollisionDetectionEnvTest, RobotWorldCollision_1) | |
| Adding obstacles to the world which are tested against the robot. Simple cases. More... | |
| TEST_F (CollisionDetectionEnvTest, RobotWorldCollision_2) | |
| Adding obstacles to the world which are tested against the robot. More... | |
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 320 of file test_fcl_env.cpp.
◆ setToHome()
|
inline |
Brings the panda robot in user defined home position.
Definition at line 53 of file test_fcl_env.cpp.
◆ TEST_F() [1/8]
| TEST_F | ( | CollisionDetectionEnvTest | , |
| DefaultNotInCollision | |||
| ) |
Tests the default values specified in the SRDF if they are collision free.
Definition at line 121 of file test_fcl_env.cpp.
◆ TEST_F() [2/8]
| TEST_F | ( | CollisionDetectionEnvTest | , |
| DISABLED_ContinuousCollisionSelf | |||
| ) |
Continuous self collision checks of the robot.
Functionality not supported yet.
Definition at line 228 of file test_fcl_env.cpp.
◆ TEST_F() [3/8]
| TEST_F | ( | CollisionDetectionEnvTest | , |
| DISABLED_ContinuousCollisionWorld | |||
| ) |
Two similar robot poses are used as start and end pose of a continuous collision check.
Functionality not supported yet.
Definition at line 272 of file test_fcl_env.cpp.
◆ TEST_F() [4/8]
| TEST_F | ( | CollisionDetectionEnvTest | , |
| InitOK | |||
| ) |
Correct setup testing.
Definition at line 115 of file test_fcl_env.cpp.
◆ TEST_F() [5/8]
| TEST_F | ( | CollisionDetectionEnvTest | , |
| LinksInCollision | |||
| ) |
A configuration where the robot should collide with itself.
Definition at line 130 of file test_fcl_env.cpp.
◆ TEST_F() [6/8]
| TEST_F | ( | CollisionDetectionEnvTest | , |
| PaddingTest | |||
| ) |
Tests the padding through expanding the link geometry in such a way that a collision occurs.
Definition at line 194 of file test_fcl_env.cpp.
◆ TEST_F() [7/8]
| TEST_F | ( | CollisionDetectionEnvTest | , |
| RobotWorldCollision_1 | |||
| ) |
Adding obstacles to the world which are tested against the robot. Simple cases.
Definition at line 143 of file test_fcl_env.cpp.
◆ TEST_F() [8/8]
| TEST_F | ( | CollisionDetectionEnvTest | , |
| RobotWorldCollision_2 | |||
| ) |
Adding obstacles to the world which are tested against the robot.
Definition at line 173 of file test_fcl_env.cpp.