#include <QLabel>#include <QWidget>#include <QSlider>#include <QComboBox>#include <QLineEdit>#include <QGroupBox>#include <QFormLayout>#include <QHBoxLayout>#include <QRadioButton>#include <shape_msgs/Mesh.h>#include <rviz/frame_manager.h>#include <tf2_eigen/tf2_eigen.h>#include <sensor_msgs/CameraInfo.h>#include <tf2_ros/transform_listener.h>#include <rviz_visual_tools/tf_visual_tools.h>#include <rviz_visual_tools/rviz_visual_tools.h>#include <image_geometry/pinhole_camera_model.h>#include <moveit_visual_tools/moveit_visual_tools.h>#include <moveit/handeye_calibration_solver/handeye_solver_base.h>#include <moveit/handeye_calibration_rviz_plugin/handeye_calibration_display.h>#include <ros/ros.h>#include <rviz/panel.h>
Include dependency graph for handeye_context_widget.h:

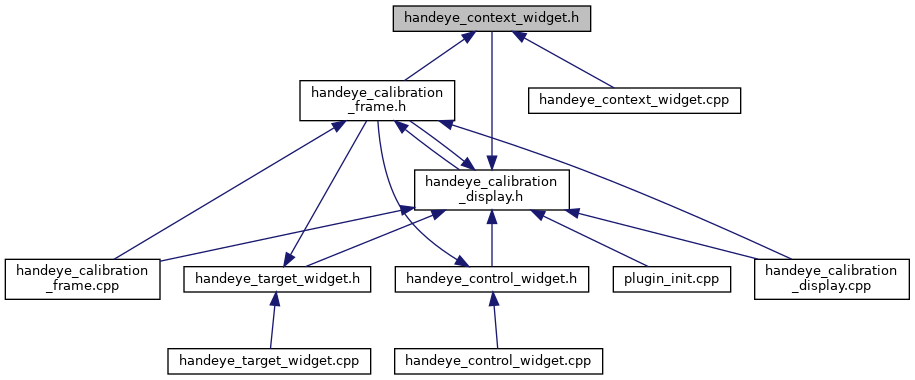
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | moveit_rviz_plugin::ContextTabWidget |
| class | moveit_rviz_plugin::SliderWidget |
| class | moveit_rviz_plugin::TFFrameNameComboBox |
Namespaces | |
| moveit_rviz_plugin | |
Enumerations | |
| enum | moveit_rviz_plugin::FRAME_SOURCE { moveit_rviz_plugin::ROBOT_FRAME = 0, moveit_rviz_plugin::CAMERA_FRAME = 1, moveit_rviz_plugin::ENVIRONMENT_FRAME = 2 } |