#include <InertialNavFactor_GlobalVelocity.h>
Public Types | |
| typedef std::shared_ptr< InertialNavFactor_GlobalVelocity > | shared_ptr |
 Public Types inherited from gtsam::NoiseModelFactorN< POSE, VELOCITY, IMUBIAS, POSE, VELOCITY > Public Types inherited from gtsam::NoiseModelFactorN< POSE, VELOCITY, IMUBIAS, POSE, VELOCITY > | |
| using | ValueType = typename std::tuple_element< I - 1, std::tuple< ValueTypes... > >::type |
| Public Types inherited from gtsam::NoiseModelFactor | |
| typedef std::shared_ptr< This > | shared_ptr |
| Public Types inherited from gtsam::NonlinearFactor | |
| typedef std::shared_ptr< This > | shared_ptr |
| Public Types inherited from gtsam::Factor | |
| typedef KeyVector::const_iterator | const_iterator |
| Const iterator over keys. More... | |
| typedef KeyVector::iterator | iterator |
| Iterator over keys. More... | |
Public Member Functions | |
| bool | equals (const NonlinearFactor &expected, double tol=1e-9) const override |
| Vector | evaluateError (const POSE &Pose1, const VELOCITY &Vel1, const IMUBIAS &Bias1, const POSE &Pose2, const VELOCITY &Vel2, OptionalMatrixType H1, OptionalMatrixType H2, OptionalMatrixType H3, OptionalMatrixType H4, OptionalMatrixType H5) const override |
| POSE | evaluatePoseError (const POSE &Pose1, const VELOCITY &Vel1, const IMUBIAS &Bias1, const POSE &Pose2, const VELOCITY &Vel2) const |
| VELOCITY | evaluateVelocityError (const POSE &Pose1, const VELOCITY &Vel1, const IMUBIAS &Bias1, const POSE &Pose2, const VELOCITY &Vel2) const |
| InertialNavFactor_GlobalVelocity () | |
| InertialNavFactor_GlobalVelocity (const Key &Pose1, const Key &Vel1, const Key &IMUBias1, const Key &Pose2, const Key &Vel2, const Vector &measurement_acc, const Vector &measurement_gyro, const double measurement_dt, const Vector world_g, const Vector world_rho, const Vector &world_omega_earth, const noiseModel::Gaussian::shared_ptr &model_continuous, std::optional< POSE > body_P_sensor={}) | |
| void | predict (const POSE &Pose1, const VELOCITY &Vel1, const IMUBIAS &Bias1, POSE &Pose2, VELOCITY &Vel2) const |
| POSE | predictPose (const POSE &Pose1, const VELOCITY &Vel1, const IMUBIAS &Bias1) const |
| VELOCITY | predictVelocity (const POSE &Pose1, const VELOCITY &Vel1, const IMUBIAS &Bias1) const |
| void | print (const std::string &s="InertialNavFactor_GlobalVelocity", const KeyFormatter &keyFormatter=DefaultKeyFormatter) const override |
| ~InertialNavFactor_GlobalVelocity () override | |
| Public Member Functions inherited from gtsam::NoiseModelFactorN< POSE, VELOCITY, IMUBIAS, POSE, VELOCITY > | |
| Key | key () const |
| virtual Vector | unwhitenedError (const Values &x, OptionalMatrixVecType H=nullptr) const =0 |
| Vector | unwhitenedError (const Values &x, std::vector< Matrix > &H) const |
| ~NoiseModelFactorN () override | |
| NoiseModelFactorN () | |
| Default Constructor for I/O. More... | |
| NoiseModelFactorN (const SharedNoiseModel &noiseModel, KeyType< ValueTypes >... keys) | |
| NoiseModelFactorN (const SharedNoiseModel &noiseModel, CONTAINER keys) | |
| Vector | unwhitenedError (const Values &x, OptionalMatrixVecType H=nullptr) const override |
| virtual Vector | evaluateError (const ValueTypes &... x, OptionalMatrixTypeT< ValueTypes >... H) const=0 |
| Vector | evaluateError (const ValueTypes &... x, MatrixTypeT< ValueTypes > &... H) const |
| Vector | evaluateError (const ValueTypes &... x) const |
| AreAllMatrixRefs< Vector, OptionalJacArgs... > | evaluateError (const ValueTypes &... x, OptionalJacArgs &&... H) const |
| AreAllMatrixPtrs< Vector, OptionalJacArgs... > | evaluateError (const ValueTypes &... x, OptionalJacArgs &&... H) const |
| Key | key1 () const |
| Key | key2 () const |
| Key | key3 () const |
| Key | key4 () const |
| Key | key5 () const |
| Key | key6 () const |
| Public Member Functions inherited from gtsam::NoiseModelFactor | |
| shared_ptr | cloneWithNewNoiseModel (const SharedNoiseModel newNoise) const |
| size_t | dim () const override |
| double | error (const HybridValues &c) const override |
| virtual double | error (const Values &c) const |
| double | error (const Values &c) const override |
| std::shared_ptr< GaussianFactor > | linearize (const Values &x) const override |
| const SharedNoiseModel & | noiseModel () const |
| access to the noise model More... | |
| NoiseModelFactor () | |
| template<typename CONTAINER > | |
| NoiseModelFactor (const SharedNoiseModel &noiseModel, const CONTAINER &keys) | |
| Vector | unweightedWhitenedError (const Values &c) const |
| Vector | unwhitenedError (const Values &x, std::vector< Matrix > &H) const |
| double | weight (const Values &c) const |
| Vector | whitenedError (const Values &c) const |
| ~NoiseModelFactor () override | |
| Public Member Functions inherited from gtsam::NonlinearFactor | |
| NonlinearFactor () | |
| template<typename CONTAINER > | |
| NonlinearFactor (const CONTAINER &keys) | |
| double | error (const HybridValues &c) const override |
| virtual bool | active (const Values &c) const |
| virtual shared_ptr | clone () const |
| virtual shared_ptr | rekey (const std::map< Key, Key > &rekey_mapping) const |
| virtual shared_ptr | rekey (const KeyVector &new_keys) const |
| virtual bool | sendable () const |
| Public Member Functions inherited from gtsam::Factor | |
| virtual | ~Factor ()=default |
| Default destructor. More... | |
| bool | empty () const |
| Whether the factor is empty (involves zero variables). More... | |
| Key | front () const |
| First key. More... | |
| Key | back () const |
| Last key. More... | |
| const_iterator | find (Key key) const |
| find More... | |
| const KeyVector & | keys () const |
| Access the factor's involved variable keys. More... | |
| const_iterator | begin () const |
| const_iterator | end () const |
| size_t | size () const |
| virtual void | printKeys (const std::string &s="Factor", const KeyFormatter &formatter=DefaultKeyFormatter) const |
| print only keys More... | |
| bool | equals (const This &other, double tol=1e-9) const |
| check equality More... | |
| KeyVector & | keys () |
| iterator | begin () |
| iterator | end () |
Static Public Member Functions | |
| static noiseModel::Gaussian::shared_ptr | calc_descrete_noise_model (const noiseModel::Gaussian::shared_ptr &model, double delta_t) |
| static void | Calc_g_rho_omega_earth_ENU (const Vector &Pos_ENU, const Vector &Vel_ENU, const Vector &LatLonHeight_IC, const Vector &Pos_ENU_Initial, Vector &g_ENU, Vector &rho_ENU, Vector &omega_earth_ENU) |
| static void | Calc_g_rho_omega_earth_NED (const Vector &Pos_NED, const Vector &Vel_NED, const Vector &LatLonHeight_IC, const Vector &Pos_NED_Initial, Vector &g_NED, Vector &rho_NED, Vector &omega_earth_NED) |
| static noiseModel::Gaussian::shared_ptr | CalcEquivalentNoiseCov (const noiseModel::Gaussian::shared_ptr &gaussian_acc, const noiseModel::Gaussian::shared_ptr &gaussian_gyro, const noiseModel::Gaussian::shared_ptr &gaussian_process) |
Private Types | |
| typedef NoiseModelFactorN< POSE, VELOCITY, IMUBIAS, POSE, VELOCITY > | Base |
| typedef InertialNavFactor_GlobalVelocity< POSE, VELOCITY, IMUBIAS > | This |
Private Attributes | |
| std::optional< POSE > | body_P_sensor_ |
| double | dt_ |
| Vector | measurement_acc_ |
| Vector | measurement_gyro_ |
| Vector | world_g_ |
| Vector | world_omega_earth_ |
| Vector | world_rho_ |
Additional Inherited Members | |
| Static Public Attributes inherited from gtsam::NoiseModelFactorN< POSE, VELOCITY, IMUBIAS, POSE, VELOCITY > | |
| constexpr static auto | N |
| N is the number of variables (N-way factor) More... | |
| Protected Types inherited from gtsam::NoiseModelFactorN< POSE, VELOCITY, IMUBIAS, POSE, VELOCITY > | |
| using | Base = NoiseModelFactor |
| using | KeyType = Key |
| using | MatrixTypeT = Matrix |
| using | OptionalMatrixTypeT = Matrix * |
| using | This = NoiseModelFactorN< ValueTypes... > |
| using | IsConvertible = typename std::enable_if< std::is_convertible< From, To >::value, void >::type |
| using | IndexIsValid = typename std::enable_if<(I >=1) &&(I<=N), void >::type |
| using | ContainerElementType = typename std::decay< decltype(*std::declval< Container >().begin())>::type |
| using | IsContainerOfKeys = IsConvertible< ContainerElementType< Container >, Key > |
| using | AreAllMatrixRefs = std::enable_if_t<(... &&std::is_convertible< Args, Matrix & >::value), Ret > |
| using | IsMatrixPointer = std::is_same< typename std::decay_t< Arg >, Matrix * > |
| using | IsNullpointer = std::is_same< typename std::decay_t< Arg >, std::nullptr_t > |
| using | AreAllMatrixPtrs = std::enable_if_t<(... &&(IsMatrixPointer< Args >::value||IsNullpointer< Args >::value)), Ret > |
| Protected Types inherited from gtsam::NoiseModelFactor | |
| typedef NonlinearFactor | Base |
| typedef NoiseModelFactor | This |
| Protected Types inherited from gtsam::NonlinearFactor | |
| typedef Factor | Base |
| typedef NonlinearFactor | This |
| Protected Member Functions inherited from gtsam::NoiseModelFactor | |
| NoiseModelFactor (const SharedNoiseModel &noiseModel) | |
| Protected Member Functions inherited from gtsam::Factor | |
| Factor () | |
| template<typename CONTAINER > | |
| Factor (const CONTAINER &keys) | |
| template<typename ITERATOR > | |
| Factor (ITERATOR first, ITERATOR last) | |
| Static Protected Member Functions inherited from gtsam::Factor | |
| template<typename CONTAINER > | |
| static Factor | FromKeys (const CONTAINER &keys) |
| template<typename ITERATOR > | |
| static Factor | FromIterators (ITERATOR first, ITERATOR last) |
| Protected Attributes inherited from gtsam::NoiseModelFactor | |
| SharedNoiseModel | noiseModel_ |
| Protected Attributes inherited from gtsam::Factor | |
| KeyVector | keys_ |
| The keys involved in this factor. More... | |
Detailed Description
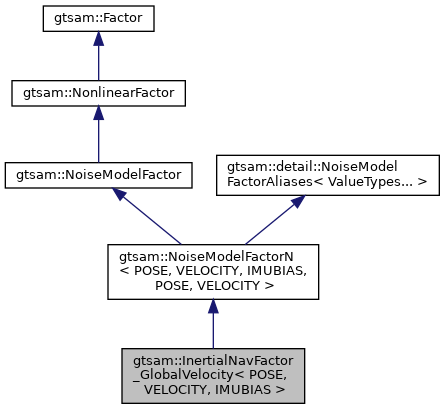
template<class POSE, class VELOCITY, class IMUBIAS>
class gtsam::InertialNavFactor_GlobalVelocity< POSE, VELOCITY, IMUBIAS >
Definition at line 77 of file InertialNavFactor_GlobalVelocity.h.
Member Typedef Documentation
◆ Base
|
private |
Definition at line 82 of file InertialNavFactor_GlobalVelocity.h.
◆ shared_ptr
| typedef std::shared_ptr<InertialNavFactor_GlobalVelocity> gtsam::InertialNavFactor_GlobalVelocity< POSE, VELOCITY, IMUBIAS >::shared_ptr |
Definition at line 100 of file InertialNavFactor_GlobalVelocity.h.
◆ This
|
private |
Definition at line 81 of file InertialNavFactor_GlobalVelocity.h.
Constructor & Destructor Documentation
◆ InertialNavFactor_GlobalVelocity() [1/2]
|
inline |
default constructor - only use for serialization
Definition at line 103 of file InertialNavFactor_GlobalVelocity.h.
◆ InertialNavFactor_GlobalVelocity() [2/2]
|
inline |
Constructor
Definition at line 106 of file InertialNavFactor_GlobalVelocity.h.
◆ ~InertialNavFactor_GlobalVelocity()
|
inlineoverride |
Definition at line 113 of file InertialNavFactor_GlobalVelocity.h.
Member Function Documentation
◆ calc_descrete_noise_model()
|
inlinestatic |
Definition at line 404 of file InertialNavFactor_GlobalVelocity.h.
◆ Calc_g_rho_omega_earth_ENU()
|
inlinestatic |
Definition at line 349 of file InertialNavFactor_GlobalVelocity.h.
◆ Calc_g_rho_omega_earth_NED()
|
inlinestatic |
Definition at line 319 of file InertialNavFactor_GlobalVelocity.h.
◆ CalcEquivalentNoiseCov()
|
inlinestatic |
Definition at line 306 of file InertialNavFactor_GlobalVelocity.h.
◆ equals()
|
inlineoverridevirtual |
equals
Reimplemented from gtsam::NoiseModelFactor.
Definition at line 137 of file InertialNavFactor_GlobalVelocity.h.
◆ evaluateError()
|
inlineoverride |
implement functions needed to derive from Factor
Definition at line 228 of file InertialNavFactor_GlobalVelocity.h.
◆ evaluatePoseError()
|
inline |
Definition at line 211 of file InertialNavFactor_GlobalVelocity.h.
◆ evaluateVelocityError()
|
inline |
Definition at line 219 of file InertialNavFactor_GlobalVelocity.h.
◆ predict()
|
inline |
Definition at line 206 of file InertialNavFactor_GlobalVelocity.h.
◆ predictPose()
|
inline |
Definition at line 149 of file InertialNavFactor_GlobalVelocity.h.
◆ predictVelocity()
|
inline |
Definition at line 176 of file InertialNavFactor_GlobalVelocity.h.
◆ print()
|
inlineoverridevirtual |
implement functions needed for Testable print
Reimplemented from gtsam::NoiseModelFactor.
Definition at line 118 of file InertialNavFactor_GlobalVelocity.h.
Member Data Documentation
◆ body_P_sensor_
|
private |
Definition at line 92 of file InertialNavFactor_GlobalVelocity.h.
◆ dt_
|
private |
Definition at line 86 of file InertialNavFactor_GlobalVelocity.h.
◆ measurement_acc_
|
private |
Definition at line 84 of file InertialNavFactor_GlobalVelocity.h.
◆ measurement_gyro_
|
private |
Definition at line 85 of file InertialNavFactor_GlobalVelocity.h.
◆ world_g_
|
private |
Definition at line 88 of file InertialNavFactor_GlobalVelocity.h.
◆ world_omega_earth_
|
private |
Definition at line 90 of file InertialNavFactor_GlobalVelocity.h.
◆ world_rho_
|
private |
Definition at line 89 of file InertialNavFactor_GlobalVelocity.h.
The documentation for this class was generated from the following file: