#include <GeneralSFMFactor.h>
Public Types | |
| typedef NoiseModelFactorN< Pose3, Point3, CALIBRATION > | Base |
| typedef for the base class More... | |
| typedef PinholeCamera< CALIBRATION > | Camera |
| typedef for camera type More... | |
| typedef std::shared_ptr< This > | shared_ptr |
| typedef GeneralSFMFactor2< CALIBRATION > | This |
 Public Types inherited from gtsam::NoiseModelFactorN< Pose3, Point3, CALIBRATION > Public Types inherited from gtsam::NoiseModelFactorN< Pose3, Point3, CALIBRATION > | |
| using | ValueType = typename std::tuple_element< I - 1, std::tuple< ValueTypes... > >::type |
| Public Types inherited from gtsam::NoiseModelFactor | |
| typedef std::shared_ptr< This > | shared_ptr |
| Public Types inherited from gtsam::NonlinearFactor | |
| typedef std::shared_ptr< This > | shared_ptr |
| Public Types inherited from gtsam::Factor | |
| typedef KeyVector::const_iterator | const_iterator |
| Const iterator over keys. More... | |
| typedef KeyVector::iterator | iterator |
| Iterator over keys. More... | |
Public Member Functions | |
| gtsam::NonlinearFactor::shared_ptr | clone () const override |
| bool | equals (const NonlinearFactor &p, double tol=1e-9) const override |
| Vector | evaluateError (const Pose3 &pose3, const Point3 &point, const CALIBRATION &calib, OptionalMatrixType H1, OptionalMatrixType H2, OptionalMatrixType H3) const override |
| GeneralSFMFactor2 (const Point2 &measured, const SharedNoiseModel &model, Key poseKey, Key landmarkKey, Key calibKey) | |
| const Point2 | measured () const |
| void | print (const std::string &s="SFMFactor2", const KeyFormatter &keyFormatter=DefaultKeyFormatter) const override |
| Public Member Functions inherited from gtsam::NoiseModelFactorN< Pose3, Point3, CALIBRATION > | |
| Key | key () const |
| virtual Vector | unwhitenedError (const Values &x, OptionalMatrixVecType H=nullptr) const =0 |
| Vector | unwhitenedError (const Values &x, std::vector< Matrix > &H) const |
| ~NoiseModelFactorN () override | |
| NoiseModelFactorN () | |
| Default Constructor for I/O. More... | |
| NoiseModelFactorN (const SharedNoiseModel &noiseModel, KeyType< ValueTypes >... keys) | |
| NoiseModelFactorN (const SharedNoiseModel &noiseModel, CONTAINER keys) | |
| Vector | unwhitenedError (const Values &x, OptionalMatrixVecType H=nullptr) const override |
| virtual Vector | evaluateError (const ValueTypes &... x, OptionalMatrixTypeT< ValueTypes >... H) const=0 |
| Vector | evaluateError (const ValueTypes &... x, MatrixTypeT< ValueTypes > &... H) const |
| Vector | evaluateError (const ValueTypes &... x) const |
| AreAllMatrixRefs< Vector, OptionalJacArgs... > | evaluateError (const ValueTypes &... x, OptionalJacArgs &&... H) const |
| AreAllMatrixPtrs< Vector, OptionalJacArgs... > | evaluateError (const ValueTypes &... x, OptionalJacArgs &&... H) const |
| Key | key1 () const |
| Key | key2 () const |
| Key | key3 () const |
| Key | key4 () const |
| Key | key5 () const |
| Key | key6 () const |
| Public Member Functions inherited from gtsam::NoiseModelFactor | |
| shared_ptr | cloneWithNewNoiseModel (const SharedNoiseModel newNoise) const |
| size_t | dim () const override |
| double | error (const HybridValues &c) const override |
| virtual double | error (const Values &c) const |
| double | error (const Values &c) const override |
| std::shared_ptr< GaussianFactor > | linearize (const Values &x) const override |
| const SharedNoiseModel & | noiseModel () const |
| access to the noise model More... | |
| NoiseModelFactor () | |
| template<typename CONTAINER > | |
| NoiseModelFactor (const SharedNoiseModel &noiseModel, const CONTAINER &keys) | |
| Vector | unweightedWhitenedError (const Values &c) const |
| Vector | unwhitenedError (const Values &x, std::vector< Matrix > &H) const |
| double | weight (const Values &c) const |
| Vector | whitenedError (const Values &c) const |
| ~NoiseModelFactor () override | |
| Public Member Functions inherited from gtsam::NonlinearFactor | |
| NonlinearFactor () | |
| template<typename CONTAINER > | |
| NonlinearFactor (const CONTAINER &keys) | |
| double | error (const HybridValues &c) const override |
| virtual bool | active (const Values &c) const |
| virtual shared_ptr | rekey (const std::map< Key, Key > &rekey_mapping) const |
| virtual shared_ptr | rekey (const KeyVector &new_keys) const |
| virtual bool | sendable () const |
| Public Member Functions inherited from gtsam::Factor | |
| virtual | ~Factor ()=default |
| Default destructor. More... | |
| bool | empty () const |
| Whether the factor is empty (involves zero variables). More... | |
| Key | front () const |
| First key. More... | |
| Key | back () const |
| Last key. More... | |
| const_iterator | find (Key key) const |
| find More... | |
| const KeyVector & | keys () const |
| Access the factor's involved variable keys. More... | |
| const_iterator | begin () const |
| const_iterator | end () const |
| size_t | size () const |
| virtual void | printKeys (const std::string &s="Factor", const KeyFormatter &formatter=DefaultKeyFormatter) const |
| print only keys More... | |
| bool | equals (const This &other, double tol=1e-9) const |
| check equality More... | |
| KeyVector & | keys () |
| iterator | begin () |
| iterator | end () |
Protected Attributes | |
| Point2 | measured_ |
| the 2D measurement More... | |
| Protected Attributes inherited from gtsam::NoiseModelFactor | |
| SharedNoiseModel | noiseModel_ |
| Protected Attributes inherited from gtsam::Factor | |
| KeyVector | keys_ |
| The keys involved in this factor. More... | |
Static Private Attributes | |
| static const int | DimK = FixedDimension<CALIBRATION>::value |
Additional Inherited Members | |
| Static Public Attributes inherited from gtsam::NoiseModelFactorN< Pose3, Point3, CALIBRATION > | |
| constexpr static auto | N |
| N is the number of variables (N-way factor) More... | |
| Protected Types inherited from gtsam::NoiseModelFactorN< Pose3, Point3, CALIBRATION > | |
| using | Base = NoiseModelFactor |
| using | KeyType = Key |
| using | MatrixTypeT = Matrix |
| using | OptionalMatrixTypeT = Matrix * |
| using | This = NoiseModelFactorN< ValueTypes... > |
| using | IsConvertible = typename std::enable_if< std::is_convertible< From, To >::value, void >::type |
| using | IndexIsValid = typename std::enable_if<(I >=1) &&(I<=N), void >::type |
| using | ContainerElementType = typename std::decay< decltype(*std::declval< Container >().begin())>::type |
| using | IsContainerOfKeys = IsConvertible< ContainerElementType< Container >, Key > |
| using | AreAllMatrixRefs = std::enable_if_t<(... &&std::is_convertible< Args, Matrix & >::value), Ret > |
| using | IsMatrixPointer = std::is_same< typename std::decay_t< Arg >, Matrix * > |
| using | IsNullpointer = std::is_same< typename std::decay_t< Arg >, std::nullptr_t > |
| using | AreAllMatrixPtrs = std::enable_if_t<(... &&(IsMatrixPointer< Args >::value||IsNullpointer< Args >::value)), Ret > |
| Protected Types inherited from gtsam::NoiseModelFactor | |
| typedef NonlinearFactor | Base |
| typedef NoiseModelFactor | This |
| Protected Types inherited from gtsam::NonlinearFactor | |
| typedef Factor | Base |
| typedef NonlinearFactor | This |
| Protected Member Functions inherited from gtsam::NoiseModelFactor | |
| NoiseModelFactor (const SharedNoiseModel &noiseModel) | |
| Protected Member Functions inherited from gtsam::Factor | |
| Factor () | |
| template<typename CONTAINER > | |
| Factor (const CONTAINER &keys) | |
| template<typename ITERATOR > | |
| Factor (ITERATOR first, ITERATOR last) | |
| Static Protected Member Functions inherited from gtsam::Factor | |
| template<typename CONTAINER > | |
| static Factor | FromKeys (const CONTAINER &keys) |
| template<typename ITERATOR > | |
| static Factor | FromIterators (ITERATOR first, ITERATOR last) |
Detailed Description
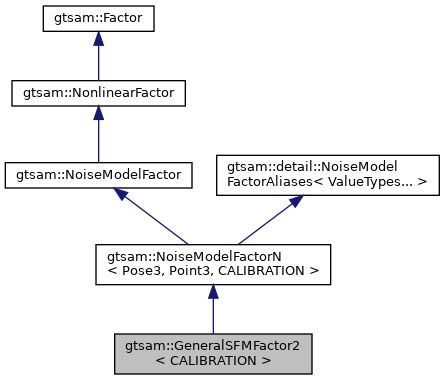
template<class CALIBRATION>
class gtsam::GeneralSFMFactor2< CALIBRATION >
Non-linear factor for a constraint derived from a 2D measurement. Compared to GeneralSFMFactor, it is a ternary-factor because the calibration is isolated from camera..
Definition at line 208 of file GeneralSFMFactor.h.
Member Typedef Documentation
◆ Base
| typedef NoiseModelFactorN<Pose3, Point3, CALIBRATION> gtsam::GeneralSFMFactor2< CALIBRATION >::Base |
typedef for the base class
Definition at line 221 of file GeneralSFMFactor.h.
◆ Camera
| typedef PinholeCamera<CALIBRATION> gtsam::GeneralSFMFactor2< CALIBRATION >::Camera |
typedef for camera type
Definition at line 220 of file GeneralSFMFactor.h.
◆ shared_ptr
| typedef std::shared_ptr<This> gtsam::GeneralSFMFactor2< CALIBRATION >::shared_ptr |
Definition at line 224 of file GeneralSFMFactor.h.
◆ This
| typedef GeneralSFMFactor2<CALIBRATION> gtsam::GeneralSFMFactor2< CALIBRATION >::This |
Definition at line 219 of file GeneralSFMFactor.h.
Constructor & Destructor Documentation
◆ GeneralSFMFactor2()
|
inline |
Constructor
- Parameters
-
measured is the 2 dimensional location of point in image (the measurement) model is the standard deviation of the measurements poseKey is the index of the camera landmarkKey is the index of the landmark calibKey is the index of the calibration
Definition at line 234 of file GeneralSFMFactor.h.
Member Function Documentation
◆ clone()
|
inlineoverridevirtual |
- Returns
- a deep copy of this factor
Reimplemented from gtsam::NonlinearFactor.
Definition at line 241 of file GeneralSFMFactor.h.
◆ equals()
|
inlineoverridevirtual |
equals
Reimplemented from gtsam::NoiseModelFactor.
Definition at line 258 of file GeneralSFMFactor.h.
◆ evaluateError()
|
inlineoverride |
h(x)-z
Definition at line 264 of file GeneralSFMFactor.h.
◆ measured()
|
inline |
return the measured
Definition at line 281 of file GeneralSFMFactor.h.
◆ print()
|
inlineoverridevirtual |
- Parameters
-
s optional string naming the factor keyFormatter optional formatter useful for printing Symbols
Reimplemented from gtsam::NoiseModelFactor.
Definition at line 250 of file GeneralSFMFactor.h.
Member Data Documentation
◆ DimK
|
staticprivate |
Definition at line 211 of file GeneralSFMFactor.h.
◆ measured_
|
protected |
the 2D measurement
Definition at line 215 of file GeneralSFMFactor.h.
The documentation for this class was generated from the following file: