A 2D Range SLAM example. More...
#include <gtsam/geometry/Pose2.h>#include <gtsam/base/Vector.h>#include <gtsam/geometry/Point2.h>#include <gtsam/inference/Symbol.h>#include <gtsam/nonlinear/ISAM2.h>#include <gtsam/nonlinear/NonlinearFactorGraph.h>#include <gtsam/nonlinear/Values.h>#include <gtsam/nonlinear/LevenbergMarquardtOptimizer.h>#include <gtsam/sam/RangeFactor.h>#include <gtsam/slam/BetweenFactor.h>#include <gtsam/slam/dataset.h>#include <gtsam/base/timing.h>#include <fstream>#include <iostream>#include <random>#include <set>#include <string>#include <utility>#include <vector>
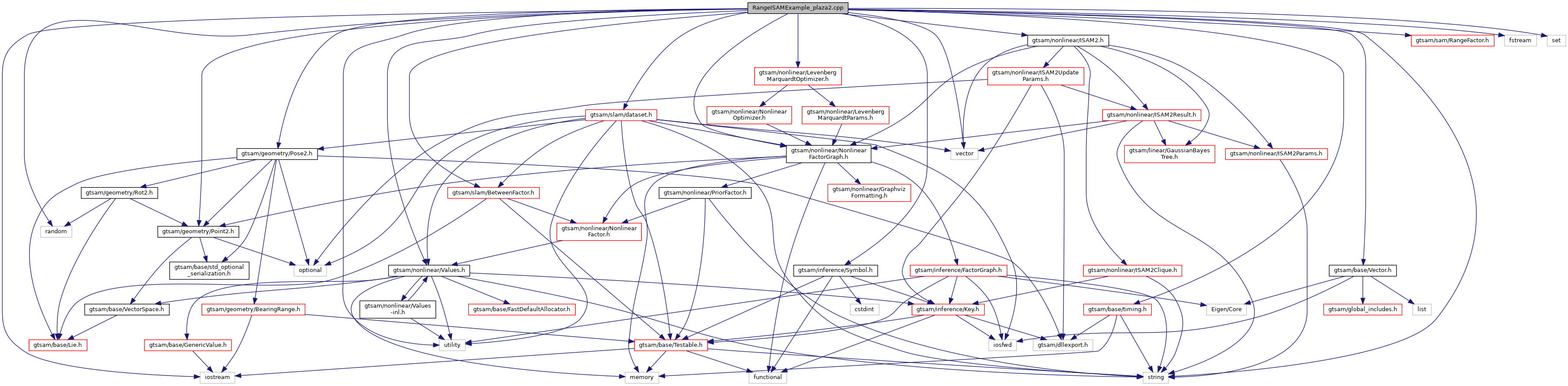
Include dependency graph for RangeISAMExample_plaza2.cpp:
Go to the source code of this file.
Typedefs | |
| using | RangeTriple = std::tuple< double, size_t, double > |
| using | TimedOdometry = std::pair< double, Pose2 > |
Functions | |
| int | main (int argc, char **argv) |
| std::list< TimedOdometry > | readOdometry () |
| std::vector< RangeTriple > | readTriples () |
Detailed Description
Typedef Documentation
◆ RangeTriple
| using RangeTriple = std::tuple<double, size_t, double> |
Definition at line 95 of file RangeISAMExample_plaza2.cpp.
◆ TimedOdometry
| using TimedOdometry = std::pair<double, Pose2> |
Definition at line 78 of file RangeISAMExample_plaza2.cpp.
Function Documentation
◆ main()
Definition at line 111 of file RangeISAMExample_plaza2.cpp.
◆ readOdometry()
| std::list<TimedOdometry> readOdometry | ( | ) |
Definition at line 79 of file RangeISAMExample_plaza2.cpp.
◆ readTriples()
| std::vector<RangeTriple> readTriples | ( | ) |
Definition at line 96 of file RangeISAMExample_plaza2.cpp.