Non-linear factor base classes. More...
#include <gtsam/nonlinear/Values.h>#include <gtsam/hybrid/HybridValues.h>#include <gtsam/linear/NoiseModel.h>#include <gtsam/linear/JacobianFactor.h>#include <gtsam/inference/Factor.h>#include <gtsam/base/OptionalJacobian.h>#include <gtsam/base/utilities.h>#include <cstddef>#include <type_traits>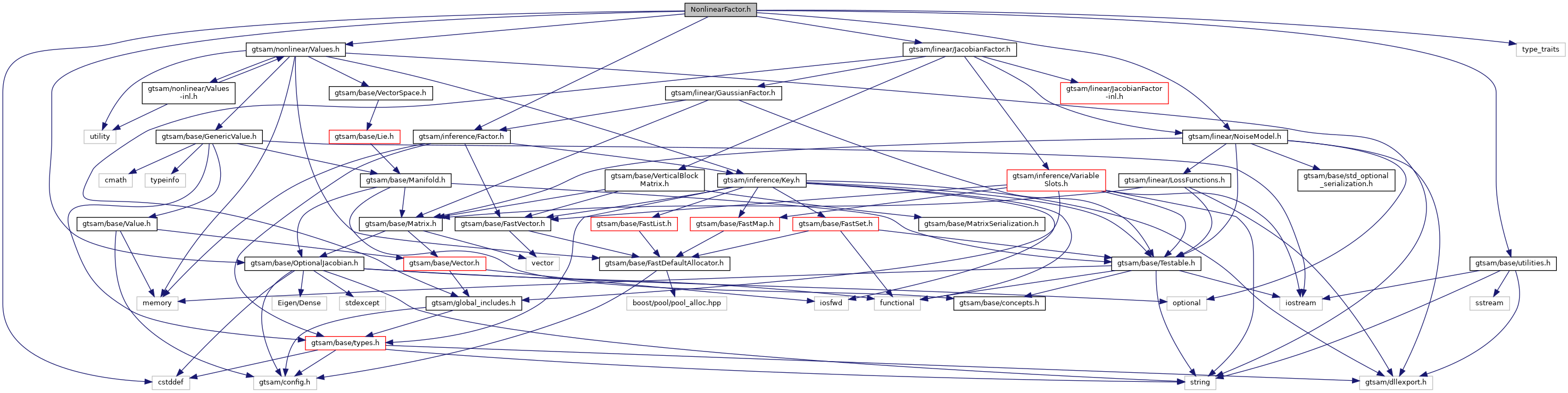
Go to the source code of this file.
Namespaces | |
| gtsam | |
| traits | |
| gtsam::detail | |
Macros | |
| #define | NoiseModelFactor1 NoiseModelFactorN |
| #define | NoiseModelFactor2 NoiseModelFactorN |
| #define | NoiseModelFactor3 NoiseModelFactorN |
| #define | NoiseModelFactor4 NoiseModelFactorN |
| #define | NoiseModelFactor5 NoiseModelFactorN |
| #define | NoiseModelFactor6 NoiseModelFactorN |
| #define | OptionalNone static_cast<gtsam::Matrix*>(nullptr) |
Typedefs | |
| using | gtsam::OptionalMatrixType = Matrix * |
| using | gtsam::OptionalMatrixVecType = std::vector< Matrix > * |
Detailed Description
Non-linear factor base classes.
Definition in file NonlinearFactor.h.
Macro Definition Documentation
◆ NoiseModelFactor1
| #define NoiseModelFactor1 NoiseModelFactorN |
Definition at line 767 of file NonlinearFactor.h.
◆ NoiseModelFactor2
| #define NoiseModelFactor2 NoiseModelFactorN |
Definition at line 768 of file NonlinearFactor.h.
◆ NoiseModelFactor3
| #define NoiseModelFactor3 NoiseModelFactorN |
Definition at line 769 of file NonlinearFactor.h.
◆ NoiseModelFactor4
| #define NoiseModelFactor4 NoiseModelFactorN |
Definition at line 770 of file NonlinearFactor.h.
◆ NoiseModelFactor5
| #define NoiseModelFactor5 NoiseModelFactorN |
Definition at line 771 of file NonlinearFactor.h.
◆ NoiseModelFactor6
| #define NoiseModelFactor6 NoiseModelFactorN |
Definition at line 772 of file NonlinearFactor.h.
◆ OptionalNone
| #define OptionalNone static_cast<gtsam::Matrix*>(nullptr) |
These typedefs and aliases will help with making the evaluateError interface independent of boost TODO(kartikarcot): Change this to OptionalMatrixNone This typedef is used to indicate that the Jacobian is not required and the default value used for optional matrix pointer arguments in evaluateError. Had to use the static_cast of a nullptr, because the compiler is not able to deduce the type of the nullptr when expanding the evaluateError templates.
Definition at line 50 of file NonlinearFactor.h.