Simple robot localization example, with three "GPS-like" measurements. More...
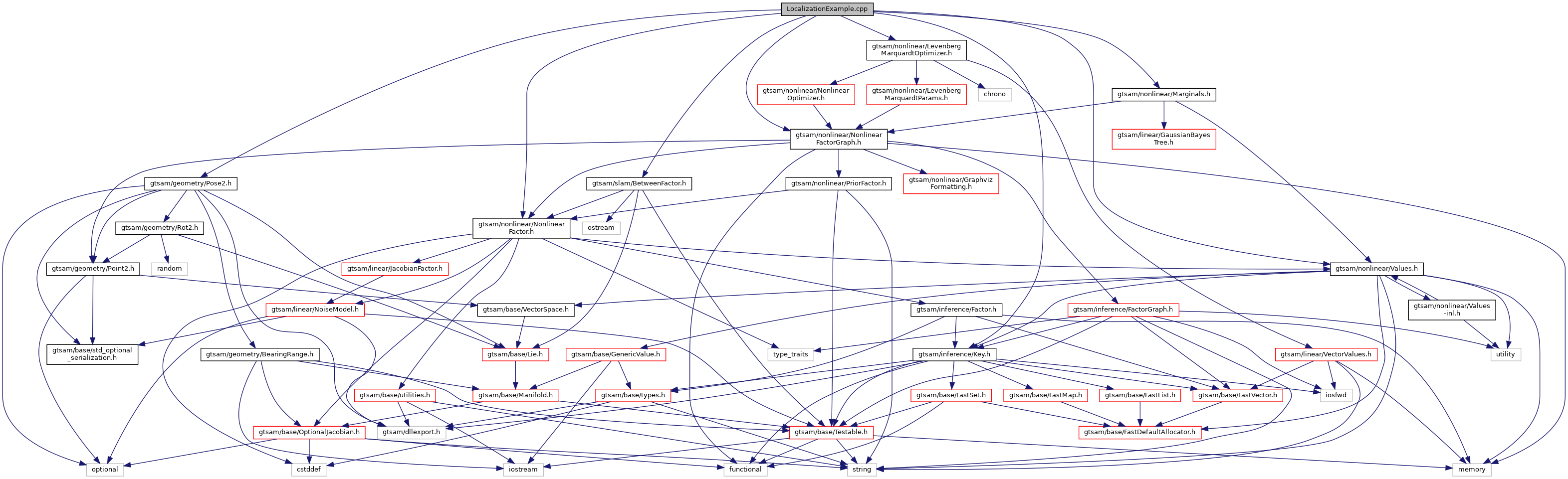
#include <gtsam/geometry/Pose2.h>#include <gtsam/inference/Key.h>#include <gtsam/slam/BetweenFactor.h>#include <gtsam/nonlinear/NonlinearFactorGraph.h>#include <gtsam/nonlinear/Values.h>#include <gtsam/nonlinear/LevenbergMarquardtOptimizer.h>#include <gtsam/nonlinear/Marginals.h>#include <gtsam/nonlinear/NonlinearFactor.h>
Include dependency graph for LocalizationExample.cpp:
Go to the source code of this file.
Classes | |
| class | UnaryFactor |
Functions | |
| int | main (int argc, char **argv) |
Detailed Description
Simple robot localization example, with three "GPS-like" measurements.
Definition in file LocalizationExample.cpp.
Function Documentation
◆ main()
Definition at line 117 of file LocalizationExample.cpp.