Implement inverse kinematics on a three-link arm using expressions. More...
#include <gtsam/geometry/Pose2.h>#include <gtsam/nonlinear/ExpressionFactorGraph.h>#include <gtsam/nonlinear/LevenbergMarquardtOptimizer.h>#include <gtsam/nonlinear/Marginals.h>#include <gtsam/nonlinear/expressions.h>#include <gtsam/slam/BetweenFactor.h>#include <gtsam/slam/expressions.h>#include <cmath>
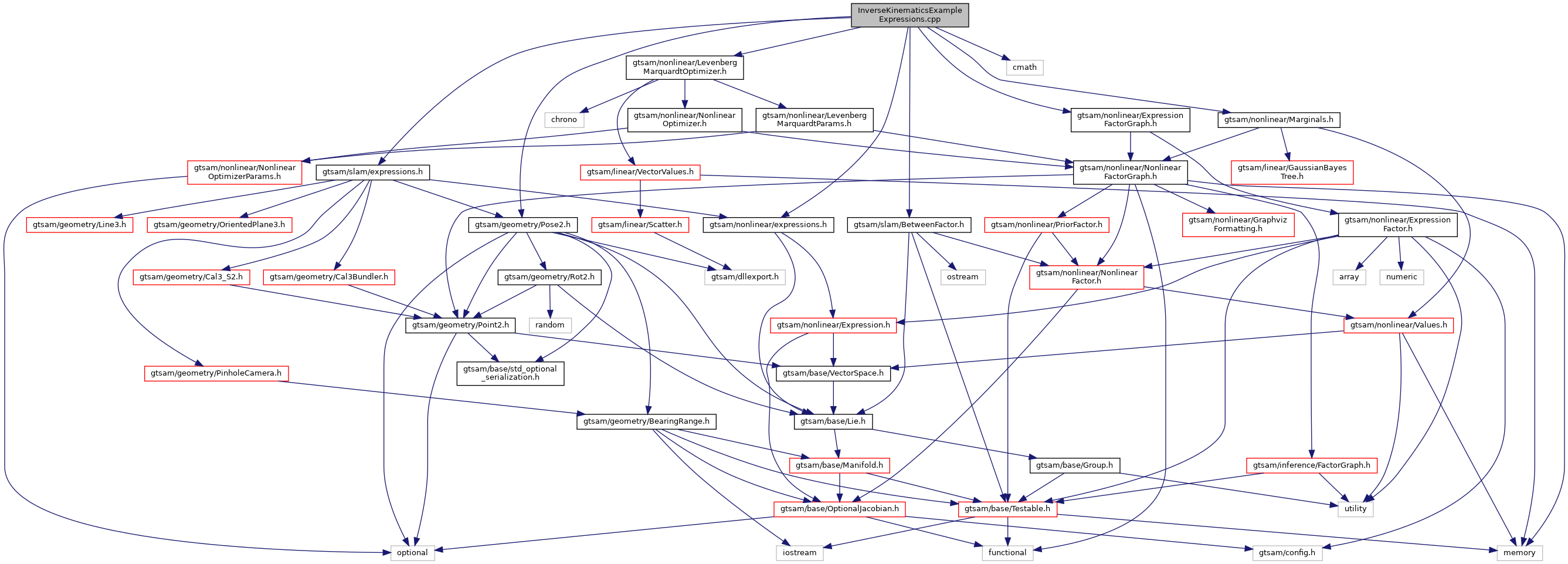
Include dependency graph for InverseKinematicsExampleExpressions.cpp:
Go to the source code of this file.
Functions | |
| Pose2_ | Expmap (const Vector3_ &xi) |
| int | main (int argc, char **argv) |
| Vector3_ | operator* (const Double_ &s, const Vector3_ &v) |
| Vector3 | scalarMultiply (const double &s, const Vector3 &v, OptionalJacobian< 3, 1 > Hs, OptionalJacobian< 3, 3 > Hv) |
Detailed Description
Implement inverse kinematics on a three-link arm using expressions.
- Date
- April 15, 2019
Definition in file InverseKinematicsExampleExpressions.cpp.
Function Documentation
◆ Expmap()
Definition at line 47 of file InverseKinematicsExampleExpressions.cpp.
◆ main()
Definition at line 50 of file InverseKinematicsExampleExpressions.cpp.
◆ operator*()
Definition at line 42 of file InverseKinematicsExampleExpressions.cpp.
◆ scalarMultiply()
|
inline |
Definition at line 33 of file InverseKinematicsExampleExpressions.cpp.