#include <iostream>#include <string>#include <gtsam/geometry/Pose3.h>#include <gtsam/nonlinear/ISAM2.h>#include <gtsam/nonlinear/Values.h>#include <gtsam/nonlinear/NonlinearFactorGraph.h>#include <gtsam/slam/BetweenFactor.h>#include <gtsam/nonlinear/IncrementalFixedLagSmoother.h>#include <gtsam/inference/Symbol.h>#include <gtsam/slam/dataset.h>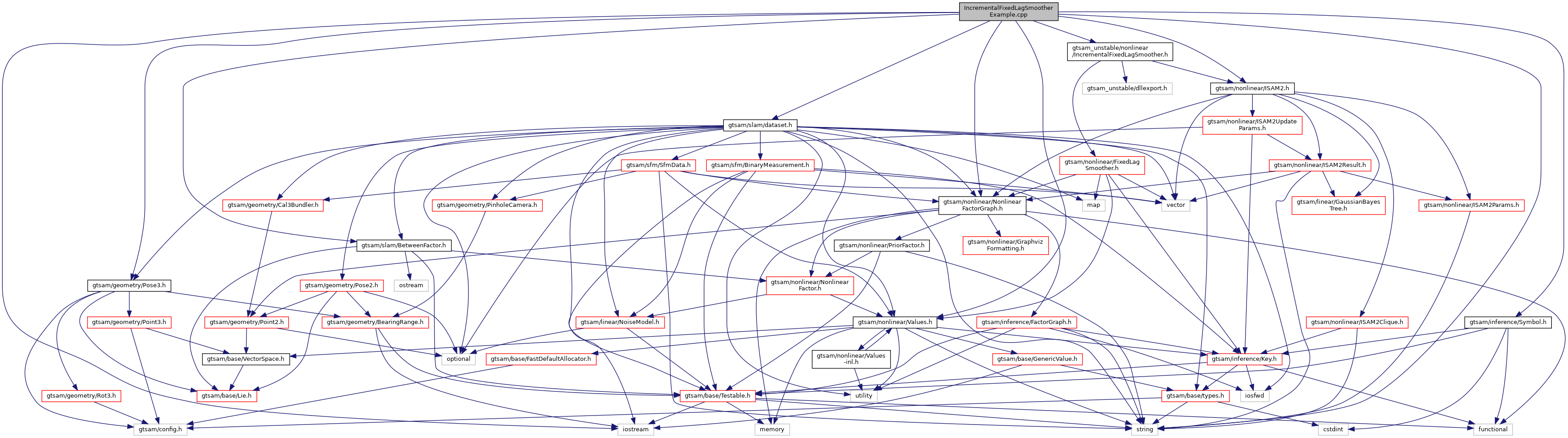
Go to the source code of this file.
Typedefs | |
| typedef Eigen::Matrix< double, 6, 6 > | Matrix6 |
Enumerations | |
| enum | FactorType { PRIOR = 0, BETWEEN = 1 } |
Functions | |
| Pose3 | createPose (double x, double y, double z, double roll, double pitch, double yaw) |
| Create a Pose3 object from individual pose parameters. More... | |
| int | main () |
| Main function: Reads poses data from a text file and performs incremental fixed-lag smoothing. More... | |
| Matrix6 | readCovarianceMatrix (istringstream &iss) |
| Read a 6x6 covariance matrix from an input string stream. More... | |
| void | saveG2oGraph (const NonlinearFactorGraph &graph, const Values &estimate, const string &filename, int iterCount) |
| Save the factor graph and estimates to a .g2o file (for visualization/debugging). More... | |
Typedef Documentation
◆ Matrix6
| typedef Eigen::Matrix<double, 6, 6> Matrix6 |
Definition at line 77 of file IncrementalFixedLagSmootherExample.cpp.
Enumeration Type Documentation
◆ FactorType
| enum FactorType |
| Enumerator | |
|---|---|
| PRIOR | |
| BETWEEN | |
Definition at line 72 of file IncrementalFixedLagSmootherExample.cpp.
Function Documentation
◆ createPose()
| Pose3 createPose | ( | double | x, |
| double | y, | ||
| double | z, | ||
| double | roll, | ||
| double | pitch, | ||
| double | yaw | ||
| ) |
Create a Pose3 object from individual pose parameters.
- Parameters
-
x Translation in x y Translation in y z Translation in z roll Rotation about x-axis pitch Rotation about y-axis yaw Rotation about z-axis
- Returns
- Constructed Pose3 object
Definition at line 108 of file IncrementalFixedLagSmootherExample.cpp.
◆ main()
| int main | ( | ) |
Main function: Reads poses data from a text file and performs incremental fixed-lag smoothing.
Data Flow: 1) Parse lines from "IncrementalFixedLagSmootherTestData.txt". 2) For each line:
- If it's a PRIOR factor, add a PriorFactor with a specified pose and covariance.
- If it's a BETWEEN factor, add a BetweenFactor with a relative pose and covariance.
- Insert new variables with initial guesses into the current solution if they don't exist. 3) Update the fixed-lag smoother (with iSAM2 inside) to incrementally optimize and marginalize out old poses beyond the specified lag window. 4) Repeat until all lines are processed. 5) Save the resulting factor graph and estimate of the last sliding window to a .g2o file.
Format: PRIOR factor factor_type timestamp key pose(x y z roll pitch yaw) cov(6x6)
Format: BETWEEN factor factor_type timestamp key1 key2 pose(x y z roll pitch yaw) cov(6x6)
Definition at line 147 of file IncrementalFixedLagSmootherExample.cpp.
◆ readCovarianceMatrix()
| Matrix6 readCovarianceMatrix | ( | istringstream & | iss | ) |
Read a 6x6 covariance matrix from an input string stream.
- Parameters
-
iss Input string stream containing covariance entries.
- Returns
- 6x6 covariance matrix.
Definition at line 86 of file IncrementalFixedLagSmootherExample.cpp.
◆ saveG2oGraph()
| void saveG2oGraph | ( | const NonlinearFactorGraph & | graph, |
| const Values & | estimate, | ||
| const string & | filename, | ||
| int | iterCount | ||
| ) |
Save the factor graph and estimates to a .g2o file (for visualization/debugging).
- Parameters
-
graph The factor graph estimate Current estimates of all variables filename Base filename for saving iterCount Iteration count to differentiate successive outputs
Definition at line 121 of file IncrementalFixedLagSmootherExample.cpp.