#include "ensenso_camera/ros2/core.h"#include <pcl_conversions/pcl_conversions.h>#include <pcl_ros/point_cloud.h>
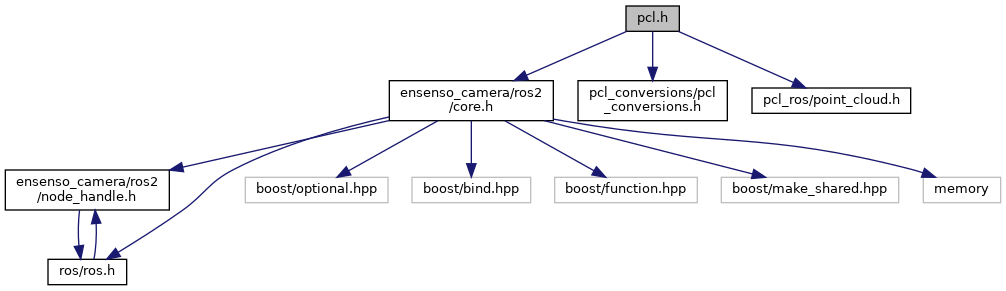
Include dependency graph for pcl.h:
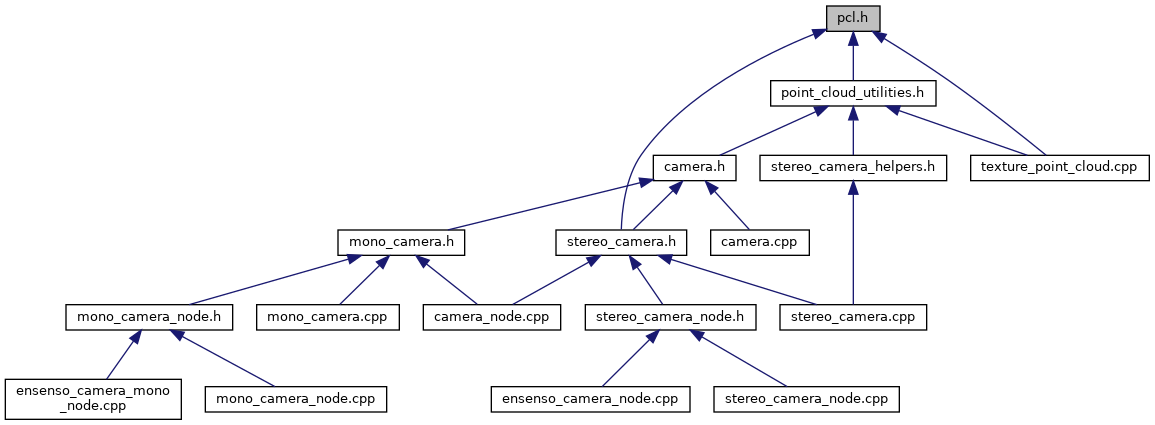
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| ensenso | |
| ensenso::pcl | |
Macros | |
| #define | POINT_CLOUD_SUBSCRIPTION_CALLBACK(callback, T, arg_name) callback(T::Ptr const& arg_name) |
| #define | STORE_POINT_CLOUD(point_cloud_boost_ptr, point_cloud_std_ptr) |
Typedefs | |
| template<typename T > | |
| using | PointCloudPublisher = ensenso::ros::Publisher< T > |
| template<typename T > | |
| using | PointCloudSubscription = ensenso::ros::Subscription< T > |
Functions | |
| template<typename T > | |
| PointCloudPublisher< T > | ensenso::pcl::create_publisher (ensenso::ros::NodeHandle &nh, ::std::string const &topic_name, int queue_size) |
| template<typename T , typename C , typename M > | |
| PointCloudSubscription< T > | ensenso::pcl::create_subscription (ensenso::ros::NodeHandle &nh, ::std::string const &topic_name, int queue_size, void(C::*callback)(M), C *object) |
| template<typename T > | |
| void | publishPointCloud (ensenso::ros::Publisher< T > const &publisher, std::unique_ptr< T > pointCloud) |
Macro Definition Documentation
◆ POINT_CLOUD_SUBSCRIPTION_CALLBACK
| #define POINT_CLOUD_SUBSCRIPTION_CALLBACK | ( | callback, | |
| T, | |||
| arg_name | |||
| ) | callback(T::Ptr const& arg_name) |
◆ STORE_POINT_CLOUD
| #define STORE_POINT_CLOUD | ( | point_cloud_boost_ptr, | |
| point_cloud_std_ptr | |||
| ) |
Value:
/* In ROS1 we only have to convert the point cloud ptr from boost to std. */ \
point_cloud_std_ptr = ensenso::std::to_std(point_cloud_boost_ptr);
Typedef Documentation
◆ PointCloudPublisher
template<typename T >
| using PointCloudPublisher = ensenso::ros::Publisher<T> |
◆ PointCloudSubscription
template<typename T >
| using PointCloudSubscription = ensenso::ros::Subscription<T> |
Function Documentation
◆ publishPointCloud()
template<typename T >
|
inline |