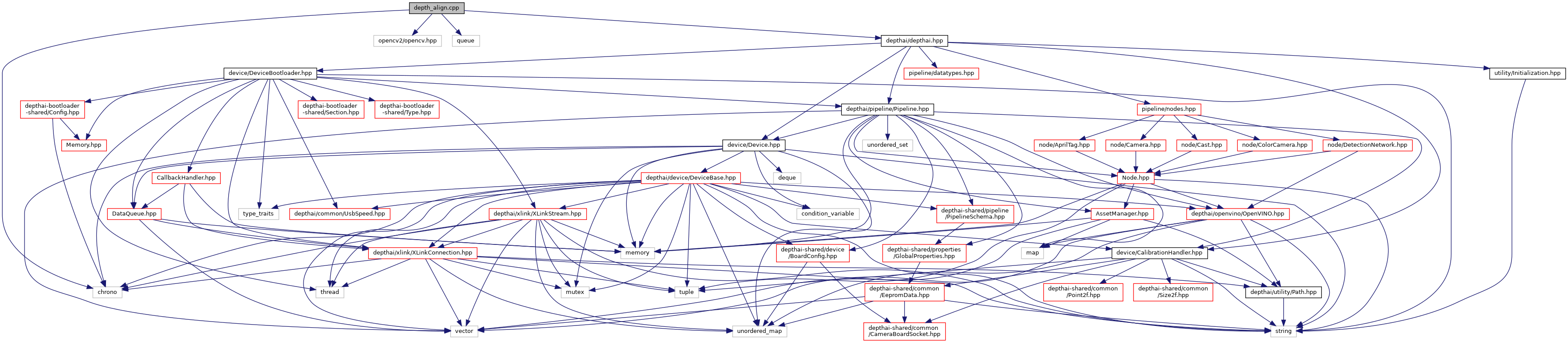
Include dependency graph for depth_align.cpp:
Go to the source code of this file.
Classes | |
| class | FPSCounter |
Functions | |
| cv::Mat | colorizeDepth (const cv::Mat &frameDepth) |
| int | main () |
| void | updateBlendWeights (int percentRgb, void *) |
Variables | |
| constexpr auto | ALIGN_SOCKET = LEFT_SOCKET |
| constexpr auto | COLOR_RESOLUTION = dai::ColorCameraProperties::SensorResolution::THE_1080_P |
| double | depthWeight = 0.6 |
| constexpr auto | FPS = 30.0 |
| constexpr auto | ISP_SCALE = 3 |
| constexpr auto | LEFT_RIGHT_RESOLUTION = dai::MonoCameraProperties::SensorResolution::THE_400_P |
| constexpr auto | LEFT_SOCKET = dai::CameraBoardSocket::CAM_B |
| constexpr auto | RGB_SOCKET = dai::CameraBoardSocket::CAM_A |
| double | rgbWeight = 0.4 |
| constexpr auto | RIGHT_SOCKET = dai::CameraBoardSocket::CAM_C |
Function Documentation
◆ colorizeDepth()
| cv::Mat colorizeDepth | ( | const cv::Mat & | frameDepth | ) |
Definition at line 45 of file depth_align.cpp.
◆ main()
| int main | ( | ) |
Definition at line 69 of file depth_align.cpp.
◆ updateBlendWeights()
| void updateBlendWeights | ( | int | percentRgb, |
| void * | |||
| ) |
Definition at line 40 of file depth_align.cpp.
Variable Documentation
◆ ALIGN_SOCKET
|
constexpr |
Definition at line 11 of file depth_align.cpp.
◆ COLOR_RESOLUTION
|
constexpr |
Definition at line 13 of file depth_align.cpp.
◆ depthWeight
| double depthWeight = 0.6 |
Definition at line 38 of file depth_align.cpp.
◆ FPS
|
constexpr |
Definition at line 7 of file depth_align.cpp.
◆ ISP_SCALE
|
constexpr |
Definition at line 15 of file depth_align.cpp.
◆ LEFT_RIGHT_RESOLUTION
|
constexpr |
Definition at line 14 of file depth_align.cpp.
◆ LEFT_SOCKET
|
constexpr |
Definition at line 9 of file depth_align.cpp.
◆ RGB_SOCKET
|
constexpr |
Definition at line 8 of file depth_align.cpp.
◆ rgbWeight
| double rgbWeight = 0.4 |
Definition at line 37 of file depth_align.cpp.
◆ RIGHT_SOCKET
|
constexpr |
Definition at line 10 of file depth_align.cpp.