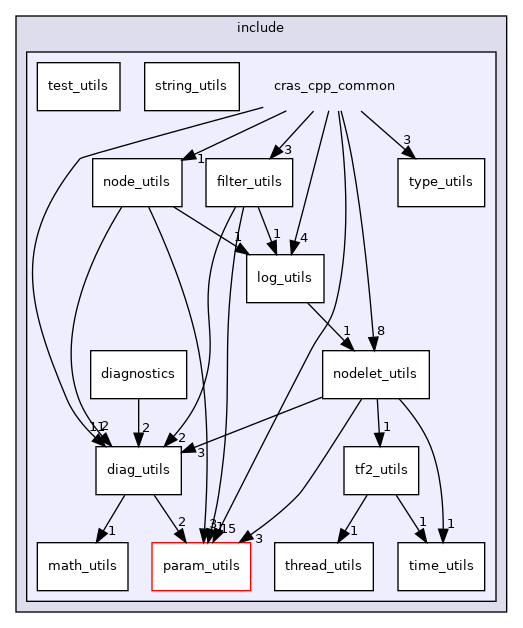
Directory dependency graph for cras_cpp_common:
Directories | |
| directory | diag_utils |
| directory | diagnostics |
| directory | filter_utils |
| directory | log_utils |
| directory | math_utils |
| directory | node_utils |
| directory | nodelet_utils |
| directory | param_utils |
| directory | string_utils |
| directory | test_utils |
| directory | tf2_utils |
| directory | thread_utils |
| directory | time_utils |
| directory | type_utils |
Files | |
| file | any.hpp [code] |
| A C++11 shim for std::any. Uses std::any when used in C++17 mode. | |
| file | c_api.h [code] |
| Support definitions for declaration of a C API of modules. | |
| file | cloud.hpp [code] |
| Utilities for comfortable working with PointCloud2 messages. | |
| file | diag_utils.hpp [code] |
| Utilities for working with diagnostics-related tools. | |
| file | expected.hpp [code] |
An implementation of the std::expected proposal. | |
| file | filter_chain_nodelet.hpp [code] |
| A versatile nodelet that can load and run a filter chain (deprecated header). | |
| file | filter_utils.hpp [code] |
| Filter utils aggregate header. It is deprecated. | |
| file | functional.hpp [code] |
| C++ utilities for working with functions. | |
| file | log_utils.h [code] |
| ROS logging helpers. | |
| file | math_utils.hpp [code] |
| Math utilities. | |
| file | node_utils.hpp [code] |
| This file adds utility functions to be used within nodes. It makes ParamHelper templated getParam() functions accessible via static global calls cras::getParam(nh, ...). It also exposes cras::NodeHandle utility class for even easier access to parameter getting. | |
| file | nodelet_utils.hpp [code] |
| This file contains a set of classes that make work with nodelets easier. | |
| file | optional.hpp [code] |
| A C++11 shim for std::optional. Uses std::optional when used in C++17 mode. | |
| file | param_utils.hpp [code] |
| This file provides helper methods easing access to parameters passed to nodes, nodelets and filters. | |
| file | pool_allocator.hpp [code] |
| Helper for allocating boost::shared_ptr instances in a boost shared pool. This should be useful if you publish shared_ptr messages and want to save some time during allocation of the new messages. The default pool size is 32 messages. Note that when publishing messages containing arrays, these functions only handle allocation of the message itself. Allocation of the array elements is done via the allocator specified in the message type. | |
| file | rate_limiter.h [code] |
| Various implementations of rate-limiting algorithms. | |
| file | resettable.h [code] |
| Interface for resettable nodes and nodelets. Automatic reset on time jumps. | |
| file | set_utils.hpp [code] |
| Utilities for working with sets. | |
| file | small_map.hpp [code] |
| Simple map implemented on top of a std::list<std::pair>. The map is append-only, with lock-free reads and mutex-protected insert. | |
| file | span.hpp [code] |
| A C++11 shim for std::span. Uses std::span when used in C++20 mode. | |
| file | string_utils.hpp [code] |
| Utils for working with strings. | |
| file | suppress_warnings.h [code] |
| Preprocessor macros to supress compiler warnings for a part of a file. | |
| file | tf2_sensor_msgs.h [code] |
| Transformation tools for sensor_msgs messages. | |
| file | tf2_utils.hpp [code] |
| Utilities for working with transforms. | |
| file | thread_utils.h [code] |
| Utilities for working with threads. | |
| file | time_utils.hpp [code] |
| Utilities for working with time. | |
| file | type_utils.hpp [code] |
| Utilities for working with C++ types. | |
| file | urdf_utils.h [code] |
| Utilities for conversions between URDF and other types. | |
| file | xmlrpc_value_traits.hpp [code] |
| Various type traits for XmlRpcValue. | |
| file | xmlrpc_value_utils.hpp [code] |
| Utilities for working with XmlRpcValues. | |