|
| int | helper () override |
| |
| bool | init (hardware_interface::RobotHW *robot_hw, ros::NodeHandle &root_nh, ros::NodeHandle &controller_nh) override |
| |
| bool | initRequest (hardware_interface::RobotHW *hw, ros::NodeHandle &nh, ros::NodeHandle &pnh, controller_interface::ControllerBase::ClaimedResources &cr) override |
| |
| void | update (const ros::Time &, const ros::Duration &) override |
| |
| virtual bool | init (hardware_interface::RobotHW *, ros::NodeHandle &) |
| |
| | MultiInterfaceController (bool allow_optional_interfaces=false) |
| |
| virtual void | aborting (const ros::Time &) |
| |
| virtual void | aborting (const ros::Time &) |
| |
| bool | abortRequest (const ros::Time &time) |
| |
| bool | abortRequest (const ros::Time &time) |
| |
| | ControllerBase ()=default |
| |
| | ControllerBase (const ControllerBase &)=delete |
| |
| | ControllerBase (ControllerBase &&)=delete |
| |
| bool | isAborted () const |
| |
| bool | isAborted () const |
| |
| bool | isInitialized () const |
| |
| bool | isInitialized () const |
| |
| bool | isRunning () const |
| |
| bool | isRunning () const |
| |
| bool | isStopped () const |
| |
| bool | isStopped () const |
| |
| bool | isWaiting () const |
| |
| bool | isWaiting () const |
| |
| ControllerBase & | operator= (const ControllerBase &)=delete |
| |
| ControllerBase & | operator= (ControllerBase &&)=delete |
| |
| virtual void | starting (const ros::Time &) |
| |
| virtual void | starting (const ros::Time &) |
| |
| bool | startRequest (const ros::Time &time) |
| |
| bool | startRequest (const ros::Time &time) |
| |
| virtual void | stopping (const ros::Time &) |
| |
| virtual void | stopping (const ros::Time &) |
| |
| bool | stopRequest (const ros::Time &time) |
| |
| bool | stopRequest (const ros::Time &time) |
| |
| void | updateRequest (const ros::Time &time, const ros::Duration &period) |
| |
| void | updateRequest (const ros::Time &time, const ros::Duration &period) |
| |
| virtual void | waiting (const ros::Time &) |
| |
| virtual void | waiting (const ros::Time &) |
| |
| bool | waitRequest (const ros::Time &time) |
| |
| bool | waitRequest (const ros::Time &time) |
| |
| virtual | ~ControllerBase ()=default |
| |
| virtual bool | init (hardware_interface::RobotHW *, ros::NodeHandle &) |
| |
| | MultiInterfaceController (bool allow_optional_interfaces=false) |
| |
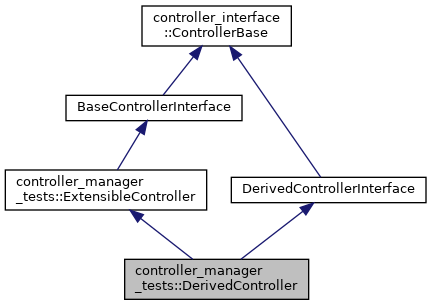
Definition at line 57 of file extensible_controllers.h.
 Public Member Functions inherited from
Public Member Functions inherited from