Include dependency graph for relay.cpp:
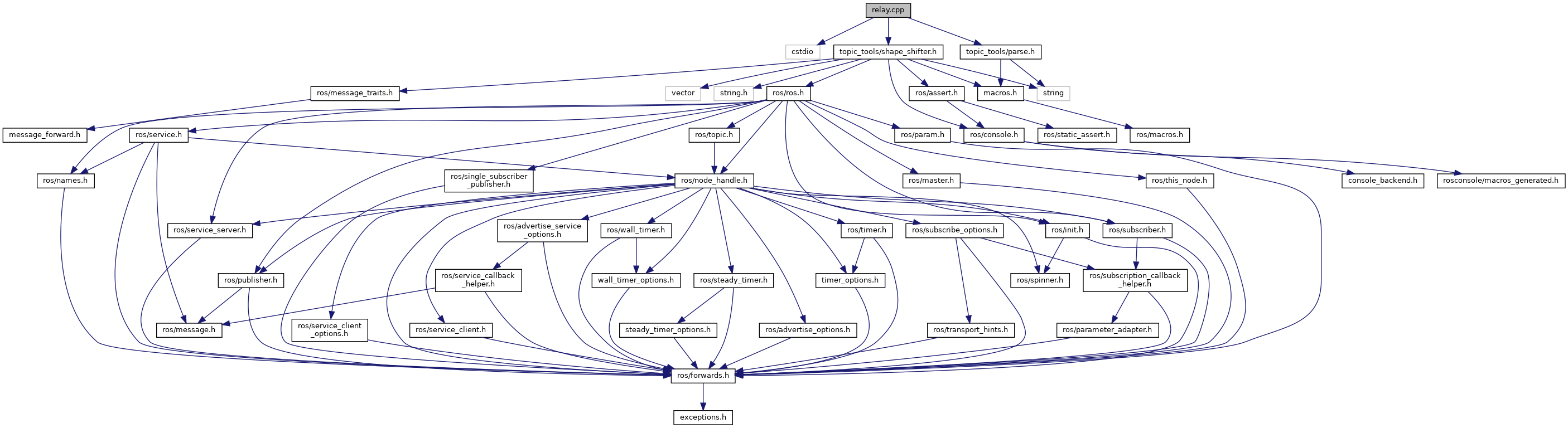
Go to the source code of this file.
Functions | |
| void | conn_cb (const ros::SingleSubscriberPublisher &) |
| void | in_cb (const ros::MessageEvent< ShapeShifter > &msg_event) |
| int | main (int argc, char **argv) |
| void | subscribe () |
| void | timer_cb (const ros::TimerEvent &) |
| void | unsubscribe () |
Variables | |
| bool | g_advertised = false |
| string | g_input_topic |
| bool | g_lazy |
| string | g_monitor_topic |
| ros::NodeHandle * | g_node = NULL |
| string | g_output_topic |
| ros::Publisher | g_pub |
| bool | g_stealth |
| ros::Subscriber * | g_sub |
| ros::TransportHints | g_th |
Function Documentation
◆ conn_cb()
| void conn_cb | ( | const ros::SingleSubscriberPublisher & | ) |
◆ in_cb()
| void in_cb | ( | const ros::MessageEvent< ShapeShifter > & | msg_event | ) |
◆ main()
◆ subscribe()
◆ timer_cb()
| void timer_cb | ( | const ros::TimerEvent & | ) |
◆ unsubscribe()
Variable Documentation
◆ g_advertised
◆ g_input_topic
◆ g_lazy
◆ g_monitor_topic
◆ g_node
| ros::NodeHandle* g_node = NULL |
◆ g_output_topic
◆ g_pub
| ros::Publisher g_pub |
◆ g_stealth
◆ g_sub
| ros::Subscriber* g_sub |
◆ g_th
| ros::TransportHints g_th |