|
| | CameraTango (bool colorCamera, int decimation, bool publishRawScan, bool smoothing) |
| |
| virtual void | close () |
| |
| void | cloudReceived (const cv::Mat &cloud, double timestamp) |
| |
| virtual std::string | getSerial () const |
| |
| virtual bool | init (const std::string &calibrationFolder=".", const std::string &cameraName="") |
| |
| void | rgbReceived (const cv::Mat &tangoImage, int type, double timestamp) |
| |
| void | setColorCamera (bool enabled) |
| |
| void | setDecimation (int value) |
| |
| void | setRawScanPublished (bool enabled) |
| |
| void | tangoEventReceived (int type, const char *key, const char *value) |
| |
| rtabmap::Transform | tangoPoseToTransform (const TangoPoseData *tangoPose) const |
| |
| virtual | ~CameraTango () |
| |
| void | addEnvSensor (int type, float value) |
| |
| | CameraMobile (bool smoothing=false) |
| |
| const CameraModel & | getCameraModel () const |
| |
| const Transform & | getDeviceTColorCamera () const |
| |
| const cv::Mat & | getOcclusionImage (CameraModel *model=0) const |
| |
| const Transform & | getOriginOffset () const |
| |
| ScreenRotation | getScreenRotation () const |
| |
| GLuint | getTextureId () |
| |
| void | getVPMatrices (glm::mat4 &view, glm::mat4 &projection) const |
| |
| virtual bool | isCalibrated () const |
| |
| void | poseReceived (const Transform &pose) |
| |
| void | resetOrigin () |
| |
| void | setData (const SensorData &data, const Transform &pose, const glm::mat4 &viewMatrix, const glm::mat4 &projectionMatrix, const float *texCoord) |
| |
| void | setGPS (const GPS &gps) |
| |
| void | setOcclusionImage (const cv::Mat &image, const CameraModel &model) |
| |
| virtual void | setScreenRotationAndSize (ScreenRotation colorCameraToDisplayRotation, int width, int height) |
| |
| void | setSmoothing (bool enabled) |
| |
| void | spinOnce () |
| |
| bool | uvsInitialized () const |
| |
| const float * | uvsTransformed () const |
| |
| virtual | ~CameraMobile () |
| |
| float | getImageRate () const |
| |
| const Transform & | getLocalTransform () const |
| |
| virtual bool | getPose (double stamp, Transform &pose, cv::Mat &covariance) |
| |
| bool | initFromFile (const std::string &calibrationPath) |
| |
| virtual bool | odomProvided () const |
| |
| void | resetTimer () |
| |
| void | setImageRate (float imageRate) |
| |
| void | setLocalTransform (const Transform &localTransform) |
| |
| SensorData | takeImage (CameraInfo *info=0) |
| |
| virtual | ~Camera () |
| |
| Handle | getThreadHandle () const |
| |
| unsigned long | getThreadId () const |
| |
| bool | isCreating () const |
| |
| bool | isIdle () const |
| |
| bool | isKilled () const |
| |
| bool | isRunning () const |
| |
| void | join (bool killFirst=false) |
| |
| void | kill () |
| |
| void | setAffinity (int cpu=0) |
| |
| void | setPriority (Priority priority) |
| |
| void | start () |
| |
| | UThread (Priority priority=kPNormal) |
| |
| virtual | ~UThread () |
| |
| int | Create (Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) const |
| |
| int | Create (Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) const |
| |
| int | Create (unsigned long &ThreadId, Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) const |
| |
| int | Create (unsigned long &ThreadId, Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) const |
| |
| virtual | ~UThreadC () |
| |
| virtual | ~UThreadC () |
| |
| | UEventsSender () |
| |
| virtual | ~UEventsSender () |
| |
|
| enum | Priority {
kPLow,
kPBelowNormal,
kPNormal,
kPAboveNormal,
kPRealTime
} |
| |
| typedef THREAD_HANDLE | Handle |
| |
| typedef THREAD_HANDLE | Handle |
| |
| typedef void(* | Handler) () |
| |
| typedef void(* | Handler) () |
| |
| static LaserScan | scanFromPointCloudData (const cv::Mat &pointCloudData, int points, const Transform &pose, const CameraModel &model, const cv::Mat &rgb, std::vector< cv::KeyPoint > *kpts=0, std::vector< cv::Point3f > *kpts3D=0, int kptsSize=3) |
| |
| static unsigned long | currentThreadId () |
| |
| static int | Create (const Handler &Function, Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) |
| |
| static int | Create (const Handler &Function, Handle *const &H=0, const bool &CreateDetached=false, const unsigned int &StackSize=0, const bool &CancelEnable=false, const bool &CancelAsync=false) |
| |
| static int | Detach (Handle H) |
| |
| static int | Detach (const Handle &H) |
| |
| static int | Join (const Handle &H) |
| |
| static int | Join (Handle H) |
| |
| static int | Kill (Handle H) |
| |
| static int | Kill (const Handle &H) |
| |
| static const float | bilateralFilteringSigmaR = 0.075f |
| |
| static const float | bilateralFilteringSigmaS = 2.0f |
| |
| static const rtabmap::Transform | opticalRotation |
| |
| static const rtabmap::Transform | opticalRotationInv |
| |
| static void | Exit () |
| |
| static void | Exit () |
| |
| static Handle | Self () |
| |
| static int | Self () |
| |
| static void | TestCancel () |
| |
| static void | TestCancel () |
| |
| Transform | deviceTColorCamera_ |
| |
| CameraModel | model_ |
| |
| glm::mat4 | projectionMatrix_ |
| |
| UTimer | spinOnceFrameRateTimer_ |
| |
| double | spinOncePreviousStamp_ |
| |
| GLuint | textureId_ |
| |
| float | transformed_uvs_ [8] |
| |
| bool | uvs_initialized_ = false |
| |
| glm::mat4 | viewMatrix_ |
| |
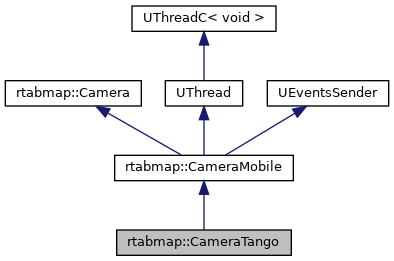
Definition at line 46 of file CameraTango.h.
 Public Member Functions inherited from rtabmap::CameraMobile
Public Member Functions inherited from rtabmap::CameraMobile