#include <transmission.h>
Public Member Functions | |
| virtual bool | initXml (TiXmlElement *config, Robot *robot)=0 |
| Initializes the transmission from XML data. More... | |
| virtual bool | initXml (TiXmlElement *config) |
| Initializes the transmission from XML data. More... | |
| virtual void | propagateEffort (std::vector< pr2_mechanism_model::JointState *> &, std::vector< pr2_hardware_interface::Actuator *> &)=0 |
| Uses commanded joint efforts to fill out commanded motor currents. More... | |
| virtual void | propagateEffortBackwards (std::vector< pr2_hardware_interface::Actuator *> &, std::vector< pr2_mechanism_model::JointState *> &)=0 |
| Uses the actuator's commanded effort to fill out the torque on the joint. More... | |
| virtual void | propagatePosition (std::vector< pr2_hardware_interface::Actuator *> &, std::vector< pr2_mechanism_model::JointState *> &)=0 |
| Uses encoder data to fill out joint position and velocities. More... | |
| virtual void | propagatePositionBackwards (std::vector< pr2_mechanism_model::JointState *> &, std::vector< pr2_hardware_interface::Actuator *> &)=0 |
| Uses the joint position to fill out the actuator's encoder. More... | |
| Transmission () | |
| Constructor. More... | |
| virtual | ~Transmission () |
| Destructor. More... | |
Public Attributes | |
| std::vector< std::string > | actuator_names_ |
| std::vector< std::string > | joint_names_ |
| std::string | name_ |
| the name of the transmission More... | |
Detailed Description
Definition at line 48 of file transmission.h.
Constructor & Destructor Documentation
◆ Transmission()
|
inline |
Constructor.
Definition at line 52 of file transmission.h.
◆ ~Transmission()
|
inlinevirtual |
Destructor.
Definition at line 55 of file transmission.h.
Member Function Documentation
◆ initXml() [1/2]
|
pure virtual |
Initializes the transmission from XML data.
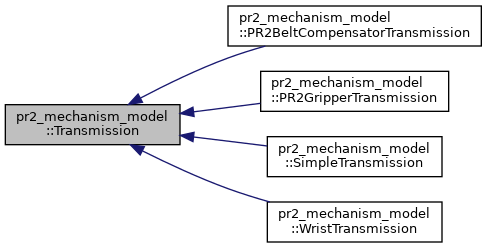
Implemented in pr2_mechanism_model::WristTransmission, pr2_mechanism_model::PR2GripperTransmission, pr2_mechanism_model::SimpleTransmission, and pr2_mechanism_model::PR2BeltCompensatorTransmission.
◆ initXml() [2/2]
|
inlinevirtual |
Initializes the transmission from XML data.
Reimplemented in pr2_mechanism_model::WristTransmission, pr2_mechanism_model::PR2GripperTransmission, pr2_mechanism_model::SimpleTransmission, and pr2_mechanism_model::PR2BeltCompensatorTransmission.
Definition at line 96 of file transmission.h.
◆ propagateEffort()
|
pure virtual |
Uses commanded joint efforts to fill out commanded motor currents.
Implemented in pr2_mechanism_model::WristTransmission, pr2_mechanism_model::PR2GripperTransmission, pr2_mechanism_model::SimpleTransmission, and pr2_mechanism_model::PR2BeltCompensatorTransmission.
◆ propagateEffortBackwards()
|
pure virtual |
Uses the actuator's commanded effort to fill out the torque on the joint.
Implemented in pr2_mechanism_model::WristTransmission, pr2_mechanism_model::PR2GripperTransmission, pr2_mechanism_model::SimpleTransmission, and pr2_mechanism_model::PR2BeltCompensatorTransmission.
◆ propagatePosition()
|
pure virtual |
Uses encoder data to fill out joint position and velocities.
Implemented in pr2_mechanism_model::WristTransmission, pr2_mechanism_model::PR2GripperTransmission, pr2_mechanism_model::SimpleTransmission, and pr2_mechanism_model::PR2BeltCompensatorTransmission.
◆ propagatePositionBackwards()
|
pure virtual |
Uses the joint position to fill out the actuator's encoder.
Implemented in pr2_mechanism_model::WristTransmission, pr2_mechanism_model::PR2GripperTransmission, pr2_mechanism_model::SimpleTransmission, and pr2_mechanism_model::PR2BeltCompensatorTransmission.
Member Data Documentation
◆ actuator_names_
| std::vector<std::string> pr2_mechanism_model::Transmission::actuator_names_ |
Specifies the names of the actuators that this transmission uses. In the propagate* methods, the order of actuators and joints in the parameters matches the order in actuator_names_ and in joint_names_.
Definition at line 85 of file transmission.h.
◆ joint_names_
| std::vector<std::string> pr2_mechanism_model::Transmission::joint_names_ |
Specifies the names of the joints that this transmission uses. In the propagate* methods, the order of actuators and joints in the parameters matches the order in actuator_names_ and in joint_names_.
Definition at line 93 of file transmission.h.
◆ name_
| std::string pr2_mechanism_model::Transmission::name_ |
the name of the transmission
Definition at line 77 of file transmission.h.
The documentation for this class was generated from the following file: