Base interface for forces representation. More...
#include <force-base.hpp>
Public Member Functions | |
| ConstAngularType | angular () const |
| Return the angular part of the force vector. More... | |
| AngularType | angular () |
| Return the angular part of the force vector. More... | |
| template<typename V3Like > | |
| void | angular (const Eigen::MatrixBase< V3Like > &n) |
| Set the angular part of the force vector. More... | |
| Derived & | derived () |
| const Derived & | derived () const |
| void | disp (std::ostream &os) const |
| template<typename MotionDerived > | |
| Scalar | dot (const MotionDense< MotionDerived > &m) const |
| FORCE_TYPEDEF_TPL (Derived) | |
| bool | isApprox (const Derived &other, const Scalar &prec=Eigen::NumTraits< Scalar >::dummy_precision()) const |
| bool | isZero (const Scalar &prec=Eigen::NumTraits< Scalar >::dummy_precision()) const |
| ConstLinearType | linear () const |
| Return the linear part of the force vector. More... | |
| LinearType | linear () |
| Return the linear part of the force vector. More... | |
| template<typename V3Like > | |
| void | linear (const Eigen::MatrixBase< V3Like > &f) |
| Set the linear part of the force vector. More... | |
| template<typename M1 > | |
| MotionAlgebraAction< Derived, M1 >::ReturnType | motionAction (const MotionDense< M1 > &v) const |
| operator Vector6 () const | |
| template<typename F2 > | |
| bool | operator!= (const ForceBase< F2 > &other) const |
| template<typename OtherScalar > | |
| ForcePlain | operator* (const OtherScalar &alpha) const |
| Derived | operator+ (const ForceBase< Derived > &phi) const |
| Derived & | operator+= (const ForceBase< Derived > &phi) |
| Replaces *this by *this + other. More... | |
| Derived | operator- () const |
| Derived | operator- (const ForceBase< Derived > &phi) const |
| Derived & | operator-= (const ForceBase< Derived > &phi) |
| Replaces *this by *this - other. More... | |
| template<typename OtherScalar > | |
| ForcePlain | operator/ (const OtherScalar &alpha) const |
| Derived & | operator= (const ForceBase< Derived > &other) |
| Copies the Derived Force into *this. More... | |
| template<typename F2 > | |
| bool | operator== (const ForceBase< F2 > &other) const |
| template<typename S2 , int O2> | |
| SE3GroupAction< Derived >::ReturnType | se3Action (const SE3Tpl< S2, O2 > &m) const |
| Transform from A to B coordinates the Force represented by *this such that
. More... | |
| template<typename S2 , int O2> | |
| SE3GroupAction< Derived >::ReturnType | se3ActionInverse (const SE3Tpl< S2, O2 > &m) const |
| Transform from B to A coordinates the Force represented by *this such that
. More... | |
| ToVectorConstReturnType | toVector () const |
| Return the force as an Eigen vector. More... | |
| ToVectorReturnType | toVector () |
| Return the force as an Eigen vector. More... | |
Friends | |
| std::ostream & | operator<< (std::ostream &os, const ForceBase< Derived > &X) |
Detailed Description
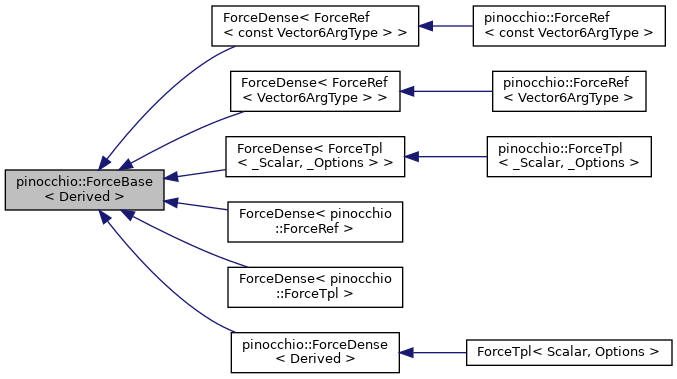
template<class Derived>
class pinocchio::ForceBase< Derived >
Base interface for forces representation.
The Class implements all
This class hierarchy represents a spatial force, e.g. a spatial impulse or force associated to a body. The spatial force is the mathematical representation of  , the dual of
, the dual of  .
.
- Template Parameters
-
Derived { description }
Definition at line 22 of file force-base.hpp.
Member Function Documentation
◆ angular() [1/3]
|
inline |
Return the angular part of the force vector.
- Returns
- The 3D vector associated to the angular part of the 6D force vector
Definition at line 35 of file force-base.hpp.
◆ angular() [2/3]
|
inline |
Return the angular part of the force vector.
- Returns
- The 3D vector associated to the angular part of the 6D force vector
Definition at line 45 of file force-base.hpp.
◆ angular() [3/3]
|
inline |
Set the angular part of the force vector.
- Template Parameters
-
V3Like A vector 3 like type.
- Parameters
-
[in] n
Definition at line 59 of file force-base.hpp.
◆ derived() [1/2]
|
inline |
Definition at line 27 of file force-base.hpp.
◆ derived() [2/2]
|
inline |
Definition at line 28 of file force-base.hpp.
◆ disp()
|
inline |
Definition at line 199 of file force-base.hpp.
◆ dot()
|
inline |
- Returns
- the dot product of *this with m *
Definition at line 157 of file force-base.hpp.
◆ FORCE_TYPEDEF_TPL()
| pinocchio::ForceBase< Derived >::FORCE_TYPEDEF_TPL | ( | Derived | ) |
◆ isApprox()
|
inline |
- Returns
- true if *this is approximately equal to other, within the precision given by prec.
Definition at line 106 of file force-base.hpp.
◆ isZero()
|
inline |
- Returns
- true if the component of the linear and angular part of the Spatial Force are approximately equal to zero, within the precision given by prec.
Definition at line 111 of file force-base.hpp.
◆ linear() [1/3]
|
inline |
Return the linear part of the force vector.
- Returns
- The 3D vector associated to the linear part of the 6D force vector
Definition at line 42 of file force-base.hpp.
◆ linear() [2/3]
|
inline |
Return the linear part of the force vector.
- Returns
- The 3D vector associated to the linear part of the 6D force vector
Definition at line 48 of file force-base.hpp.
◆ linear() [3/3]
|
inline |
Set the linear part of the force vector.
- Template Parameters
-
V3Like A vector 3 like type.
- Parameters
-
[in] f
Definition at line 70 of file force-base.hpp.
◆ motionAction()
|
inline |
Definition at line 194 of file force-base.hpp.
◆ operator Vector6()
|
inline |
Definition at line 90 of file force-base.hpp.
◆ operator!=()
|
inline |
- Returns
- true if at least one coefficient of
*thisand other does not match.
Definition at line 102 of file force-base.hpp.
◆ operator*()
|
inline |
- Returns
- an expression of *this scaled by the factor alpha
Definition at line 139 of file force-base.hpp.
◆ operator+()
|
inline |
- Returns
- an expression of the sum of *this and other
Definition at line 134 of file force-base.hpp.
◆ operator+=()
|
inline |
Replaces *this by *this + other.
- Returns
- a reference to *this
Definition at line 124 of file force-base.hpp.
◆ operator-() [1/2]
|
inline |
- Returns
- an expression of the opposite of *this
Definition at line 148 of file force-base.hpp.
◆ operator-() [2/2]
|
inline |
- Returns
- an expression of the difference of *this and phi
Definition at line 152 of file force-base.hpp.
◆ operator-=()
|
inline |
Replaces *this by *this - other.
- Returns
- a reference to *this
Definition at line 130 of file force-base.hpp.
◆ operator/()
|
inline |
- Returns
- an expression of *this divided by the factor alpha
Definition at line 144 of file force-base.hpp.
◆ operator=()
|
inline |
Copies the Derived Force into *this.
- Returns
- a reference to *this
Definition at line 117 of file force-base.hpp.
◆ operator==()
|
inline |
- Returns
- true if each coefficients of
*thisand other are all exactly equal.
- Warning
- When using floating point scalar values you probably should rather use a fuzzy comparison such as isApprox()
Definition at line 97 of file force-base.hpp.
◆ se3Action()
|
inline |
Transform from A to B coordinates the Force represented by *this such that

.
- Parameters
-
[in] m The rigid transformation  whose coordinates transform for forces is {}^{B}X_A^*
whose coordinates transform for forces is {}^{B}X_A^*
- Returns
- an expression of the force expressed in the new coordinates
Definition at line 173 of file force-base.hpp.
◆ se3ActionInverse()
|
inline |
Transform from B to A coordinates the Force represented by *this such that

.
- Parameters
-
[in] m The rigid transformation whose coordinates transform for forces is {}^{B}X_A^*
- Returns
- an expression of the force expressed in the new coordinates
Definition at line 189 of file force-base.hpp.
◆ toVector() [1/2]
|
inline |
Return the force as an Eigen vector.
- Returns
- The 6D vector
 such that
such that 
Definition at line 81 of file force-base.hpp.
◆ toVector() [2/2]
|
inline |
Return the force as an Eigen vector.
- Returns
- The 6D vector such that
Definition at line 84 of file force-base.hpp.
Friends And Related Function Documentation
◆ operator<<
|
friend |
Definition at line 200 of file force-base.hpp.
The documentation for this class was generated from the following file: