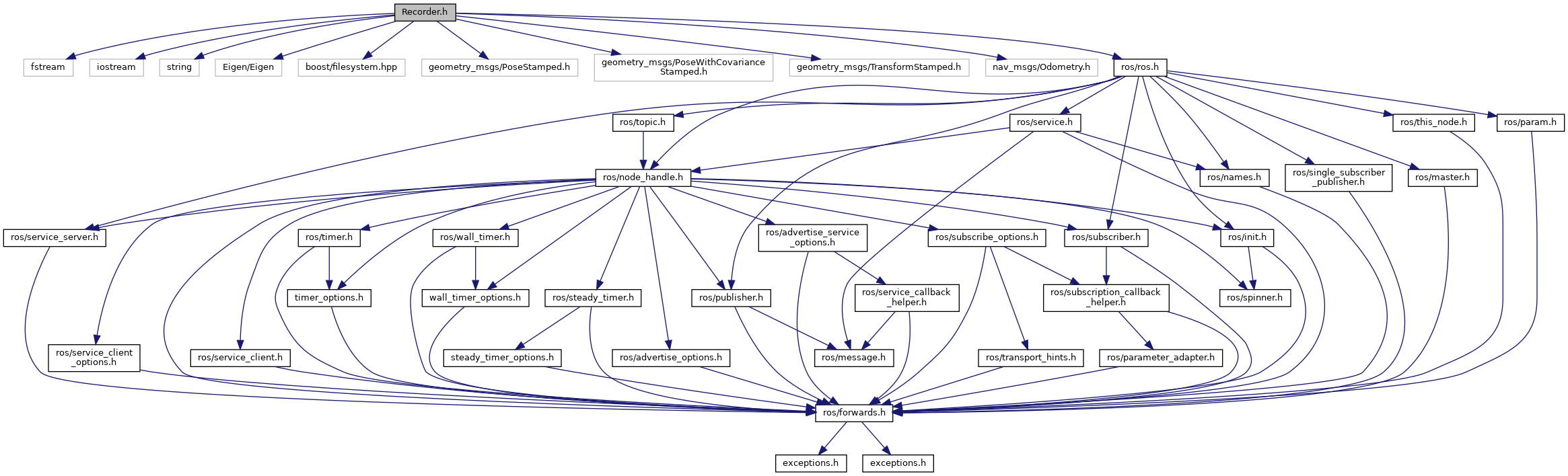
#include <fstream>#include <iostream>#include <string>#include <Eigen/Eigen>#include <boost/filesystem.hpp>#include <geometry_msgs/PoseStamped.h>#include <geometry_msgs/PoseWithCovarianceStamped.h>#include <geometry_msgs/TransformStamped.h>#include <nav_msgs/Odometry.h>#include <ros/ros.h>
Include dependency graph for Recorder.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ov_eval::Recorder |
| This class takes in published poses and writes them to file. More... | |
Namespaces | |
| ov_eval | |
| Evaluation and recording utilities. | |