#include <PathPlannerSVC_impl.h>
Public Member Functions | |
| CORBA::Boolean | calcPath () |
| void | clearRoadmap () |
| void | getAlgorithmNames (OpenHRP::StringSequence_out algos) |
| void | getMobilityNames (OpenHRP::StringSequence_out mobilities) |
| void | getOptimizerNames (OpenHRP::StringSequence_out optimizers) |
| void | getPath (OpenHRP::PathPlanner::PointArray_out path) |
| bool | getProperties (const char *alg, OpenHRP::StringSequence_out props, OpenHRP::StringSequence_out defaults) |
| void | getRoadmap (OpenHRP::PathPlanner::Roadmap_out graph) |
| void | initPlanner () |
| void | initSimulation () |
| OpenHRP_PathPlannerSVC_impl () | |
| CORBA::Boolean | optimize (const char *optimizer) |
| void | registerCharacter (const char *name, OpenHRP::BodyInfo_ptr cInfo) |
| void | registerCharacterByURL (const char *name, const char *url) |
| void | registerIntersectionCheckPair (const char *char1, const char *name1, const char *char2, const char *name2, CORBA::Double tolerance) |
| void | setAlgorithmName (const char *algorithm) |
| void | setCharacterPosition (const char *character, const OpenHRP::DblSequence &pos) |
| void | setGoalPosition (CORBA::Double x, CORBA::Double y, CORBA::Double theta) |
| bool | setMobilityName (const char *mobility) |
| void | setNameServer (std::string nameServer) |
| void | setProperties (const OpenHRP::PathPlanner::Property &properites) |
| void | setRobotName (const char *model) |
| void | setStartPosition (CORBA::Double x, CORBA::Double y, CORBA::Double theta) |
| void | stopPlanning () |
| virtual | ~OpenHRP_PathPlannerSVC_impl () |
Private Attributes | |
| std::string | nameServer_ |
| PathEngine::PathPlanner * | path_ |
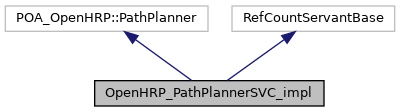
Detailed Description
Definition at line 18 of file PathPlannerSVC_impl.h.
Constructor & Destructor Documentation
◆ OpenHRP_PathPlannerSVC_impl()
| OpenHRP_PathPlannerSVC_impl::OpenHRP_PathPlannerSVC_impl | ( | ) |
Definition at line 17 of file PathPlannerSVC_impl.cpp.
◆ ~OpenHRP_PathPlannerSVC_impl()
|
virtual |
Definition at line 28 of file PathPlannerSVC_impl.cpp.
Member Function Documentation
◆ calcPath()
| CORBA::Boolean OpenHRP_PathPlannerSVC_impl::calcPath | ( | ) |
Definition at line 221 of file PathPlannerSVC_impl.cpp.
◆ clearRoadmap()
| void OpenHRP_PathPlannerSVC_impl::clearRoadmap | ( | ) |
Definition at line 65 of file PathPlannerSVC_impl.cpp.
◆ getAlgorithmNames()
| void OpenHRP_PathPlannerSVC_impl::getAlgorithmNames | ( | OpenHRP::StringSequence_out | algos | ) |
Definition at line 110 of file PathPlannerSVC_impl.cpp.
◆ getMobilityNames()
| void OpenHRP_PathPlannerSVC_impl::getMobilityNames | ( | OpenHRP::StringSequence_out | mobilities | ) |
Definition at line 71 of file PathPlannerSVC_impl.cpp.
◆ getOptimizerNames()
| void OpenHRP_PathPlannerSVC_impl::getOptimizerNames | ( | OpenHRP::StringSequence_out | optimizers | ) |
Definition at line 83 of file PathPlannerSVC_impl.cpp.
◆ getPath()
| void OpenHRP_PathPlannerSVC_impl::getPath | ( | OpenHRP::PathPlanner::PointArray_out | path | ) |
Definition at line 239 of file PathPlannerSVC_impl.cpp.
◆ getProperties()
| bool OpenHRP_PathPlannerSVC_impl::getProperties | ( | const char * | alg, |
| OpenHRP::StringSequence_out | props, | ||
| OpenHRP::StringSequence_out | defaults | ||
| ) |
Definition at line 122 of file PathPlannerSVC_impl.cpp.
◆ getRoadmap()
| void OpenHRP_PathPlannerSVC_impl::getRoadmap | ( | OpenHRP::PathPlanner::Roadmap_out | graph | ) |
Definition at line 41 of file PathPlannerSVC_impl.cpp.
◆ initPlanner()
| void OpenHRP_PathPlannerSVC_impl::initPlanner | ( | ) |
Definition at line 159 of file PathPlannerSVC_impl.cpp.
◆ initSimulation()
| void OpenHRP_PathPlannerSVC_impl::initSimulation | ( | ) |
Definition at line 284 of file PathPlannerSVC_impl.cpp.
◆ optimize()
| CORBA::Boolean OpenHRP_PathPlannerSVC_impl::optimize | ( | const char * | optimizer | ) |
Definition at line 294 of file PathPlannerSVC_impl.cpp.
◆ registerCharacter()
| void OpenHRP_PathPlannerSVC_impl::registerCharacter | ( | const char * | name, |
| OpenHRP::BodyInfo_ptr | cInfo | ||
| ) |
Definition at line 267 of file PathPlannerSVC_impl.cpp.
◆ registerCharacterByURL()
Definition at line 272 of file PathPlannerSVC_impl.cpp.
◆ registerIntersectionCheckPair()
| void OpenHRP_PathPlannerSVC_impl::registerIntersectionCheckPair | ( | const char * | char1, |
| const char * | name1, | ||
| const char * | char2, | ||
| const char * | name2, | ||
| CORBA::Double | tolerance | ||
| ) |
Definition at line 258 of file PathPlannerSVC_impl.cpp.
◆ setAlgorithmName()
Definition at line 100 of file PathPlannerSVC_impl.cpp.
◆ setCharacterPosition()
| void OpenHRP_PathPlannerSVC_impl::setCharacterPosition | ( | const char * | character, |
| const OpenHRP::DblSequence & | pos | ||
| ) |
Definition at line 277 of file PathPlannerSVC_impl.cpp.
◆ setGoalPosition()
| void OpenHRP_PathPlannerSVC_impl::setGoalPosition | ( | CORBA::Double | x, |
| CORBA::Double | y, | ||
| CORBA::Double | theta | ||
| ) |
Definition at line 177 of file PathPlannerSVC_impl.cpp.
◆ setMobilityName()
| bool OpenHRP_PathPlannerSVC_impl::setMobilityName | ( | const char * | mobility | ) |
Definition at line 105 of file PathPlannerSVC_impl.cpp.
◆ setNameServer()
|
inline |
Definition at line 66 of file PathPlannerSVC_impl.h.
◆ setProperties()
| void OpenHRP_PathPlannerSVC_impl::setProperties | ( | const OpenHRP::PathPlanner::Property & | properites | ) |
Definition at line 188 of file PathPlannerSVC_impl.cpp.
◆ setRobotName()
Definition at line 95 of file PathPlannerSVC_impl.cpp.
◆ setStartPosition()
| void OpenHRP_PathPlannerSVC_impl::setStartPosition | ( | CORBA::Double | x, |
| CORBA::Double | y, | ||
| CORBA::Double | theta | ||
| ) |
Definition at line 166 of file PathPlannerSVC_impl.cpp.
◆ stopPlanning()
| void OpenHRP_PathPlannerSVC_impl::stopPlanning | ( | ) |
Definition at line 33 of file PathPlannerSVC_impl.cpp.
Member Data Documentation
◆ nameServer_
|
private |
OpenHRP が使用しているネームサーバ
Definition at line 35 of file PathPlannerSVC_impl.h.
◆ path_
|
private |
計画経路エンジン
Definition at line 30 of file PathPlannerSVC_impl.h.
The documentation for this class was generated from the following files: