#include <tests/simulated2DConstraints.h>#include <gtsam/nonlinear/PriorFactor.h>#include <gtsam/slam/ProjectionFactor.h>#include <gtsam/nonlinear/NonlinearEquality.h>#include <gtsam/nonlinear/NonlinearFactorGraph.h>#include <gtsam/nonlinear/LevenbergMarquardtOptimizer.h>#include <gtsam/linear/GaussianBayesNet.h>#include <gtsam/inference/Symbol.h>#include <gtsam/geometry/Point2.h>#include <gtsam/geometry/Pose2.h>#include <gtsam/geometry/Point3.h>#include <gtsam/geometry/Pose3.h>#include <gtsam/geometry/Cal3_S2.h>#include <gtsam/geometry/PinholeCamera.h>#include <CppUnitLite/TestHarness.h>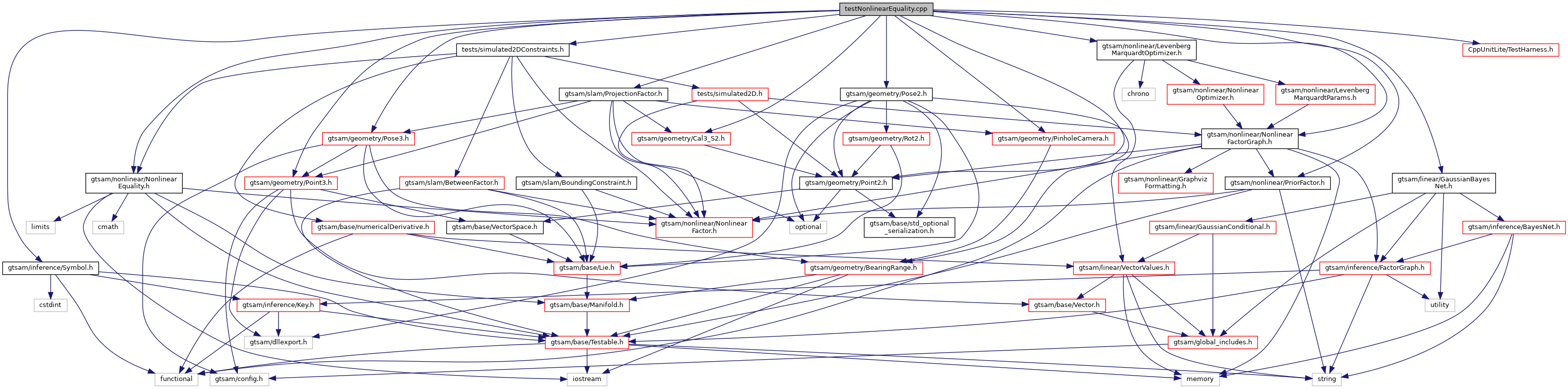
Go to the source code of this file.
Typedefs | |
| typedef NonlinearEquality< Pose2 > | PoseNLE |
| typedef PriorFactor< Pose2 > | PosePrior |
| typedef std::shared_ptr< PoseNLE > | shared_poseNLE |
Functions | |
| int | main () |
| TEST (NonlinearEquality, linearization) | |
| TEST (NonlinearEquality, linearization_pose) | |
| TEST (NonlinearEquality, linearization_fail) | |
| TEST (NonlinearEquality, linearization_fail_pose) | |
| TEST (NonlinearEquality, linearization_fail_pose_origin) | |
| TEST (NonlinearEquality, error) | |
| TEST (NonlinearEquality, equals) | |
| TEST (NonlinearEquality, allow_error_pose) | |
| TEST (NonlinearEquality, allow_error_optimize) | |
| TEST (NonlinearEquality, allow_error_optimize_with_factors) | |
| TEST (testNonlinearEqualityConstraint, unary_basics) | |
| TEST (testNonlinearEqualityConstraint, unary_linearization) | |
| TEST (testNonlinearEqualityConstraint, unary_simple_optimization) | |
| TEST (testNonlinearEqualityConstraint, odo_basics) | |
| TEST (testNonlinearEqualityConstraint, odo_linearization) | |
| TEST (testNonlinearEqualityConstraint, odo_simple_optimize) | |
| TEST (testNonlinearEqualityConstraint, two_pose) | |
| TEST (testNonlinearEqualityConstraint, map_warp) | |
| TEST (testNonlinearEqualityConstraint, stereo_constrained) | |
Variables | |
| static SharedDiagonal | hard_model = noiseModel::Constrained::All(2) |
| static Symbol | key ('x', 1) |
| static SharedDiagonal | soft_model = noiseModel::Isotropic::Sigma(2, 1.0) |
| static const double | tol = 1e-5 |
Typedef Documentation
◆ PoseNLE
| typedef NonlinearEquality<Pose2> PoseNLE |
Definition at line 43 of file testNonlinearEquality.cpp.
◆ PosePrior
| typedef PriorFactor<Pose2> PosePrior |
Definition at line 42 of file testNonlinearEquality.cpp.
◆ shared_poseNLE
| typedef std::shared_ptr<PoseNLE> shared_poseNLE |
Definition at line 44 of file testNonlinearEquality.cpp.
Function Documentation
◆ main()
| int main | ( | void | ) |
Definition at line 579 of file testNonlinearEquality.cpp.
◆ TEST() [1/19]
| TEST | ( | NonlinearEquality | , |
| linearization | |||
| ) |
Definition at line 49 of file testNonlinearEquality.cpp.
◆ TEST() [2/19]
| TEST | ( | NonlinearEquality | , |
| linearization_pose | |||
| ) |
Definition at line 65 of file testNonlinearEquality.cpp.
◆ TEST() [3/19]
| TEST | ( | NonlinearEquality | , |
| linearization_fail | |||
| ) |
Definition at line 80 of file testNonlinearEquality.cpp.
◆ TEST() [4/19]
| TEST | ( | NonlinearEquality | , |
| linearization_fail_pose | |||
| ) |
Definition at line 94 of file testNonlinearEquality.cpp.
◆ TEST() [5/19]
| TEST | ( | NonlinearEquality | , |
| linearization_fail_pose_origin | |||
| ) |
Definition at line 109 of file testNonlinearEquality.cpp.
◆ TEST() [6/19]
| TEST | ( | NonlinearEquality | , |
| error | |||
| ) |
Definition at line 124 of file testNonlinearEquality.cpp.
◆ TEST() [7/19]
| TEST | ( | NonlinearEquality | , |
| equals | |||
| ) |
Definition at line 144 of file testNonlinearEquality.cpp.
◆ TEST() [8/19]
| TEST | ( | NonlinearEquality | , |
| allow_error_pose | |||
| ) |
Definition at line 163 of file testNonlinearEquality.cpp.
◆ TEST() [9/19]
| TEST | ( | NonlinearEquality | , |
| allow_error_optimize | |||
| ) |
Definition at line 192 of file testNonlinearEquality.cpp.
◆ TEST() [10/19]
| TEST | ( | NonlinearEquality | , |
| allow_error_optimize_with_factors | |||
| ) |
Definition at line 218 of file testNonlinearEquality.cpp.
◆ TEST() [11/19]
| TEST | ( | testNonlinearEqualityConstraint | , |
| unary_basics | |||
| ) |
Definition at line 253 of file testNonlinearEquality.cpp.
◆ TEST() [12/19]
| TEST | ( | testNonlinearEqualityConstraint | , |
| unary_linearization | |||
| ) |
Definition at line 278 of file testNonlinearEquality.cpp.
◆ TEST() [13/19]
| TEST | ( | testNonlinearEqualityConstraint | , |
| unary_simple_optimization | |||
| ) |
Definition at line 301 of file testNonlinearEquality.cpp.
◆ TEST() [14/19]
| TEST | ( | testNonlinearEqualityConstraint | , |
| odo_basics | |||
| ) |
Definition at line 334 of file testNonlinearEquality.cpp.
◆ TEST() [15/19]
| TEST | ( | testNonlinearEqualityConstraint | , |
| odo_linearization | |||
| ) |
Definition at line 362 of file testNonlinearEquality.cpp.
◆ TEST() [16/19]
| TEST | ( | testNonlinearEqualityConstraint | , |
| odo_simple_optimize | |||
| ) |
Definition at line 390 of file testNonlinearEquality.cpp.
◆ TEST() [17/19]
| TEST | ( | testNonlinearEqualityConstraint | , |
| two_pose | |||
| ) |
Definition at line 427 of file testNonlinearEquality.cpp.
◆ TEST() [18/19]
| TEST | ( | testNonlinearEqualityConstraint | , |
| map_warp | |||
| ) |
Definition at line 469 of file testNonlinearEquality.cpp.
◆ TEST() [19/19]
| TEST | ( | testNonlinearEqualityConstraint | , |
| stereo_constrained | |||
| ) |
Definition at line 514 of file testNonlinearEquality.cpp.
Variable Documentation
◆ hard_model
|
static |
Definition at line 249 of file testNonlinearEquality.cpp.
◆ key
◆ soft_model
|
static |
Definition at line 250 of file testNonlinearEquality.cpp.
◆ tol
|
static |
Definition at line 40 of file testNonlinearEquality.cpp.