Some functions to compute numerical derivatives. More...
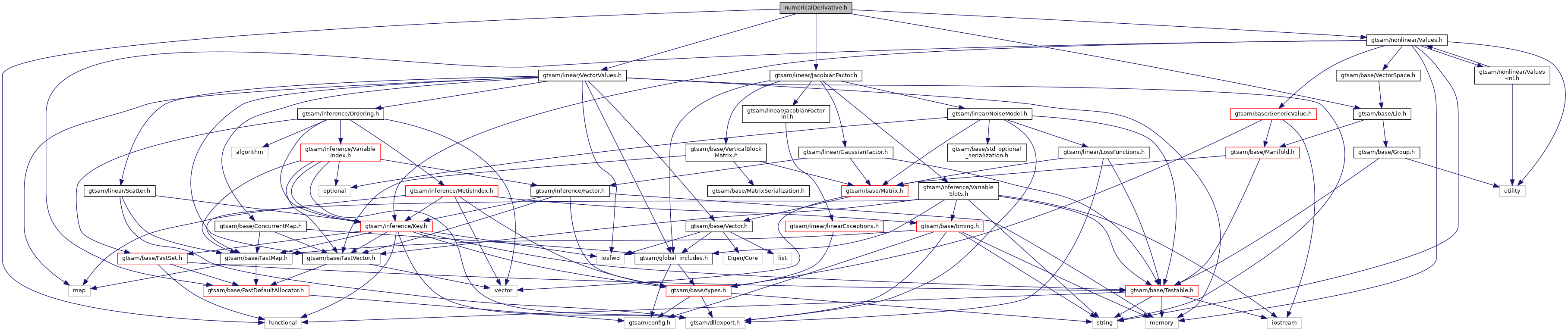
#include <functional>#include <gtsam/linear/VectorValues.h>#include <gtsam/linear/JacobianFactor.h>#include <gtsam/nonlinear/Values.h>#include <gtsam/base/Lie.h>
Include dependency graph for numericalDerivative.h:
Go to the source code of this file.
Classes | |
| struct | gtsam::internal::FixedSizeMatrix< Y, X > |
| class | gtsam::G_x1< X1, X2 > |
Namespaces | |
| gtsam | |
| traits | |
| gtsam::internal | |
Functions | |
| template<class Y , class X , int N = traits<X>::dimension> | |
| internal::FixedSizeMatrix< Y, X >::type | gtsam::numericalDerivative11 (std::function< Y(const X &)> h, const X &x, double delta=1e-5) |
| New-style numerical derivatives using manifold_traits. More... | |
| template<class Y , class X > | |
| internal::FixedSizeMatrix< Y, X >::type | gtsam::numericalDerivative11 (Y(*h)(const X &), const X &x, double delta=1e-5) |
| template<class Y , class X1 , class X2 , int N = traits<X1>::dimension> | |
| internal::FixedSizeMatrix< Y, X1 >::type | gtsam::numericalDerivative21 (const std::function< Y(const X1 &, const X2 &)> &h, const X1 &x1, const X2 &x2, double delta=1e-5) |
| template<class Y , class X1 , class X2 > | |
| internal::FixedSizeMatrix< Y, X1 >::type | gtsam::numericalDerivative21 (Y(*h)(const X1 &, const X2 &), const X1 &x1, const X2 &x2, double delta=1e-5) |
| template<class Y , class X1 , class X2 , int N = traits<X2>::dimension> | |
| internal::FixedSizeMatrix< Y, X2 >::type | gtsam::numericalDerivative22 (std::function< Y(const X1 &, const X2 &)> h, const X1 &x1, const X2 &x2, double delta=1e-5) |
| template<class Y , class X1 , class X2 > | |
| internal::FixedSizeMatrix< Y, X2 >::type | gtsam::numericalDerivative22 (Y(*h)(const X1 &, const X2 &), const X1 &x1, const X2 &x2, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , int N = traits<X1>::dimension> | |
| internal::FixedSizeMatrix< Y, X1 >::type | gtsam::numericalDerivative31 (std::function< Y(const X1 &, const X2 &, const X3 &)> h, const X1 &x1, const X2 &x2, const X3 &x3, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 > | |
| internal::FixedSizeMatrix< Y, X1 >::type | gtsam::numericalDerivative31 (Y(*h)(const X1 &, const X2 &, const X3 &), const X1 &x1, const X2 &x2, const X3 &x3, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , int N = traits<X2>::dimension> | |
| internal::FixedSizeMatrix< Y, X2 >::type | gtsam::numericalDerivative32 (std::function< Y(const X1 &, const X2 &, const X3 &)> h, const X1 &x1, const X2 &x2, const X3 &x3, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 > | |
| internal::FixedSizeMatrix< Y, X2 >::type | gtsam::numericalDerivative32 (Y(*h)(const X1 &, const X2 &, const X3 &), const X1 &x1, const X2 &x2, const X3 &x3, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , int N = traits<X3>::dimension> | |
| internal::FixedSizeMatrix< Y, X3 >::type | gtsam::numericalDerivative33 (std::function< Y(const X1 &, const X2 &, const X3 &)> h, const X1 &x1, const X2 &x2, const X3 &x3, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 > | |
| internal::FixedSizeMatrix< Y, X3 >::type | gtsam::numericalDerivative33 (Y(*h)(const X1 &, const X2 &, const X3 &), const X1 &x1, const X2 &x2, const X3 &x3, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , class X4 , int N = traits<X1>::dimension> | |
| internal::FixedSizeMatrix< Y, X1 >::type | gtsam::numericalDerivative41 (std::function< Y(const X1 &, const X2 &, const X3 &, const X4 &)> h, const X1 &x1, const X2 &x2, const X3 &x3, const X4 &x4, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , class X4 > | |
| internal::FixedSizeMatrix< Y, X1 >::type | gtsam::numericalDerivative41 (Y(*h)(const X1 &, const X2 &, const X3 &, const X4 &), const X1 &x1, const X2 &x2, const X3 &x3, const X4 &x4, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , class X4 , int N = traits<X2>::dimension> | |
| internal::FixedSizeMatrix< Y, X2 >::type | gtsam::numericalDerivative42 (std::function< Y(const X1 &, const X2 &, const X3 &, const X4 &)> h, const X1 &x1, const X2 &x2, const X3 &x3, const X4 &x4, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , class X4 > | |
| internal::FixedSizeMatrix< Y, X2 >::type | gtsam::numericalDerivative42 (Y(*h)(const X1 &, const X2 &, const X3 &, const X4 &), const X1 &x1, const X2 &x2, const X3 &x3, const X4 &x4, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , class X4 , int N = traits<X3>::dimension> | |
| internal::FixedSizeMatrix< Y, X3 >::type | gtsam::numericalDerivative43 (std::function< Y(const X1 &, const X2 &, const X3 &, const X4 &)> h, const X1 &x1, const X2 &x2, const X3 &x3, const X4 &x4, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , class X4 > | |
| internal::FixedSizeMatrix< Y, X3 >::type | gtsam::numericalDerivative43 (Y(*h)(const X1 &, const X2 &, const X3 &, const X4 &), const X1 &x1, const X2 &x2, const X3 &x3, const X4 &x4, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , class X4 , int N = traits<X4>::dimension> | |
| internal::FixedSizeMatrix< Y, X4 >::type | gtsam::numericalDerivative44 (std::function< Y(const X1 &, const X2 &, const X3 &, const X4 &)> h, const X1 &x1, const X2 &x2, const X3 &x3, const X4 &x4, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , class X4 > | |
| internal::FixedSizeMatrix< Y, X4 >::type | gtsam::numericalDerivative44 (Y(*h)(const X1 &, const X2 &, const X3 &, const X4 &), const X1 &x1, const X2 &x2, const X3 &x3, const X4 &x4, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , class X4 , class X5 , int N = traits<X1>::dimension> | |
| internal::FixedSizeMatrix< Y, X1 >::type | gtsam::numericalDerivative51 (std::function< Y(const X1 &, const X2 &, const X3 &, const X4 &, const X5 &)> h, const X1 &x1, const X2 &x2, const X3 &x3, const X4 &x4, const X5 &x5, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , class X4 , class X5 > | |
| internal::FixedSizeMatrix< Y, X1 >::type | gtsam::numericalDerivative51 (Y(*h)(const X1 &, const X2 &, const X3 &, const X4 &, const X5 &), const X1 &x1, const X2 &x2, const X3 &x3, const X4 &x4, const X5 &x5, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , class X4 , class X5 , int N = traits<X2>::dimension> | |
| internal::FixedSizeMatrix< Y, X2 >::type | gtsam::numericalDerivative52 (std::function< Y(const X1 &, const X2 &, const X3 &, const X4 &, const X5 &)> h, const X1 &x1, const X2 &x2, const X3 &x3, const X4 &x4, const X5 &x5, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , class X4 , class X5 > | |
| internal::FixedSizeMatrix< Y, X2 >::type | gtsam::numericalDerivative52 (Y(*h)(const X1 &, const X2 &, const X3 &, const X4 &, const X5 &), const X1 &x1, const X2 &x2, const X3 &x3, const X4 &x4, const X5 &x5, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , class X4 , class X5 , int N = traits<X3>::dimension> | |
| internal::FixedSizeMatrix< Y, X3 >::type | gtsam::numericalDerivative53 (std::function< Y(const X1 &, const X2 &, const X3 &, const X4 &, const X5 &)> h, const X1 &x1, const X2 &x2, const X3 &x3, const X4 &x4, const X5 &x5, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , class X4 , class X5 > | |
| internal::FixedSizeMatrix< Y, X3 >::type | gtsam::numericalDerivative53 (Y(*h)(const X1 &, const X2 &, const X3 &, const X4 &, const X5 &), const X1 &x1, const X2 &x2, const X3 &x3, const X4 &x4, const X5 &x5, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , class X4 , class X5 , int N = traits<X4>::dimension> | |
| internal::FixedSizeMatrix< Y, X4 >::type | gtsam::numericalDerivative54 (std::function< Y(const X1 &, const X2 &, const X3 &, const X4 &, const X5 &)> h, const X1 &x1, const X2 &x2, const X3 &x3, const X4 &x4, const X5 &x5, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , class X4 , class X5 > | |
| internal::FixedSizeMatrix< Y, X4 >::type | gtsam::numericalDerivative54 (Y(*h)(const X1 &, const X2 &, const X3 &, const X4 &, const X5 &), const X1 &x1, const X2 &x2, const X3 &x3, const X4 &x4, const X5 &x5, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , class X4 , class X5 , int N = traits<X5>::dimension> | |
| internal::FixedSizeMatrix< Y, X5 >::type | gtsam::numericalDerivative55 (std::function< Y(const X1 &, const X2 &, const X3 &, const X4 &, const X5 &)> h, const X1 &x1, const X2 &x2, const X3 &x3, const X4 &x4, const X5 &x5, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , class X4 , class X5 > | |
| internal::FixedSizeMatrix< Y, X5 >::type | gtsam::numericalDerivative55 (Y(*h)(const X1 &, const X2 &, const X3 &, const X4 &, const X5 &), const X1 &x1, const X2 &x2, const X3 &x3, const X4 &x4, const X5 &x5, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , class X4 , class X5 , class X6 , int N = traits<X1>::dimension> | |
| internal::FixedSizeMatrix< Y, X1 >::type | gtsam::numericalDerivative61 (std::function< Y(const X1 &, const X2 &, const X3 &, const X4 &, const X5 &, const X6 &)> h, const X1 &x1, const X2 &x2, const X3 &x3, const X4 &x4, const X5 &x5, const X6 &x6, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , class X4 , class X5 , class X6 > | |
| internal::FixedSizeMatrix< Y, X1 >::type | gtsam::numericalDerivative61 (Y(*h)(const X1 &, const X2 &, const X3 &, const X4 &, const X5 &, const X6 &), const X1 &x1, const X2 &x2, const X3 &x3, const X4 &x4, const X5 &x5, const X6 &x6, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , class X4 , class X5 , class X6 , int N = traits<X2>::dimension> | |
| internal::FixedSizeMatrix< Y, X2 >::type | gtsam::numericalDerivative62 (std::function< Y(const X1 &, const X2 &, const X3 &, const X4 &, const X5 &, const X6 &)> h, const X1 &x1, const X2 &x2, const X3 &x3, const X4 &x4, const X5 &x5, const X6 &x6, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , class X4 , class X5 , class X6 > | |
| internal::FixedSizeMatrix< Y, X2 >::type | gtsam::numericalDerivative62 (Y(*h)(const X1 &, const X2 &, const X3 &, const X4 &, const X5 &, const X6 &), const X1 &x1, const X2 &x2, const X3 &x3, const X4 &x4, const X5 &x5, const X6 &x6, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , class X4 , class X5 , class X6 , int N = traits<X3>::dimension> | |
| internal::FixedSizeMatrix< Y, X3 >::type | gtsam::numericalDerivative63 (std::function< Y(const X1 &, const X2 &, const X3 &, const X4 &, const X5 &, const X6 &)> h, const X1 &x1, const X2 &x2, const X3 &x3, const X4 &x4, const X5 &x5, const X6 &x6, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , class X4 , class X5 , class X6 > | |
| internal::FixedSizeMatrix< Y, X3 >::type | gtsam::numericalDerivative63 (Y(*h)(const X1 &, const X2 &, const X3 &, const X4 &, const X5 &, const X6 &), const X1 &x1, const X2 &x2, const X3 &x3, const X4 &x4, const X5 &x5, const X6 &x6, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , class X4 , class X5 , class X6 , int N = traits<X4>::dimension> | |
| internal::FixedSizeMatrix< Y, X4 >::type | gtsam::numericalDerivative64 (std::function< Y(const X1 &, const X2 &, const X3 &, const X4 &, const X5 &, const X6 &)> h, const X1 &x1, const X2 &x2, const X3 &x3, const X4 &x4, const X5 &x5, const X6 &x6, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , class X4 , class X5 , class X6 > | |
| internal::FixedSizeMatrix< Y, X4 >::type | gtsam::numericalDerivative64 (Y(*h)(const X1 &, const X2 &, const X3 &, const X4 &, const X5 &, const X6 &), const X1 &x1, const X2 &x2, const X3 &x3, const X4 &x4, const X5 &x5, const X6 &x6, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , class X4 , class X5 , class X6 , int N = traits<X5>::dimension> | |
| internal::FixedSizeMatrix< Y, X5 >::type | gtsam::numericalDerivative65 (std::function< Y(const X1 &, const X2 &, const X3 &, const X4 &, const X5 &, const X6 &)> h, const X1 &x1, const X2 &x2, const X3 &x3, const X4 &x4, const X5 &x5, const X6 &x6, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , class X4 , class X5 , class X6 > | |
| internal::FixedSizeMatrix< Y, X5 >::type | gtsam::numericalDerivative65 (Y(*h)(const X1 &, const X2 &, const X3 &, const X4 &, const X5 &, const X6 &), const X1 &x1, const X2 &x2, const X3 &x3, const X4 &x4, const X5 &x5, const X6 &x6, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , class X4 , class X5 , class X6 , int N = traits<X6>::dimension> | |
| internal::FixedSizeMatrix< Y, X6 >::type | gtsam::numericalDerivative66 (std::function< Y(const X1 &, const X2 &, const X3 &, const X4 &, const X5 &, const X6 &)> h, const X1 &x1, const X2 &x2, const X3 &x3, const X4 &x4, const X5 &x5, const X6 &x6, double delta=1e-5) |
| template<class Y , class X1 , class X2 , class X3 , class X4 , class X5 , class X6 > | |
| internal::FixedSizeMatrix< Y, X6 >::type | gtsam::numericalDerivative66 (Y(*h)(const X1 &, const X2 &, const X3 &, const X4 &, const X5 &, const X6 &), const X1 &x1, const X2 &x2, const X3 &x3, const X4 &x4, const X5 &x5, const X6 &x6, double delta=1e-5) |
| template<class X , int N = traits<X>::dimension> | |
| Eigen::Matrix< double, N, 1 > | gtsam::numericalGradient (std::function< double(const X &)> h, const X &x, double delta=1e-5) |
| Numerically compute gradient of scalar function. More... | |
| template<class X > | |
| internal::FixedSizeMatrix< X, X >::type | gtsam::numericalHessian (std::function< double(const X &)> f, const X &x, double delta=1e-5) |
| template<class X > | |
| internal::FixedSizeMatrix< X, X >::type | gtsam::numericalHessian (double(*f)(const X &), const X &x, double delta=1e-5) |
| template<class X1 , class X2 > | |
| internal::FixedSizeMatrix< X1, X1 >::type | gtsam::numericalHessian211 (std::function< double(const X1 &, const X2 &)> f, const X1 &x1, const X2 &x2, double delta=1e-5) |
| template<class X1 , class X2 > | |
| internal::FixedSizeMatrix< X1, X1 >::type | gtsam::numericalHessian211 (double(*f)(const X1 &, const X2 &), const X1 &x1, const X2 &x2, double delta=1e-5) |
| template<class X1 , class X2 > | |
| internal::FixedSizeMatrix< X1, X2 >::type | gtsam::numericalHessian212 (std::function< double(const X1 &, const X2 &)> f, const X1 &x1, const X2 &x2, double delta=1e-5) |
| template<class X1 , class X2 > | |
| internal::FixedSizeMatrix< X1, X2 >::type | gtsam::numericalHessian212 (double(*f)(const X1 &, const X2 &), const X1 &x1, const X2 &x2, double delta=1e-5) |
| template<class X1 , class X2 > | |
| internal::FixedSizeMatrix< X2, X2 >::type | gtsam::numericalHessian222 (std::function< double(const X1 &, const X2 &)> f, const X1 &x1, const X2 &x2, double delta=1e-5) |
| template<class X1 , class X2 > | |
| internal::FixedSizeMatrix< X2, X2 >::type | gtsam::numericalHessian222 (double(*f)(const X1 &, const X2 &), const X1 &x1, const X2 &x2, double delta=1e-5) |
| template<class X1 , class X2 , class X3 > | |
| internal::FixedSizeMatrix< X1, X1 >::type | gtsam::numericalHessian311 (std::function< double(const X1 &, const X2 &, const X3 &)> f, const X1 &x1, const X2 &x2, const X3 &x3, double delta=1e-5) |
| template<class X1 , class X2 , class X3 > | |
| internal::FixedSizeMatrix< X1, X1 >::type | gtsam::numericalHessian311 (double(*f)(const X1 &, const X2 &, const X3 &), const X1 &x1, const X2 &x2, const X3 &x3, double delta=1e-5) |
| template<class X1 , class X2 , class X3 > | |
| internal::FixedSizeMatrix< X1, X2 >::type | gtsam::numericalHessian312 (std::function< double(const X1 &, const X2 &, const X3 &)> f, const X1 &x1, const X2 &x2, const X3 &x3, double delta=1e-5) |
| template<class X1 , class X2 , class X3 > | |
| internal::FixedSizeMatrix< X1, X2 >::type | gtsam::numericalHessian312 (double(*f)(const X1 &, const X2 &, const X3 &), const X1 &x1, const X2 &x2, const X3 &x3, double delta=1e-5) |
| template<class X1 , class X2 , class X3 > | |
| internal::FixedSizeMatrix< X1, X3 >::type | gtsam::numericalHessian313 (std::function< double(const X1 &, const X2 &, const X3 &)> f, const X1 &x1, const X2 &x2, const X3 &x3, double delta=1e-5) |
| template<class X1 , class X2 , class X3 > | |
| internal::FixedSizeMatrix< X1, X3 >::type | gtsam::numericalHessian313 (double(*f)(const X1 &, const X2 &, const X3 &), const X1 &x1, const X2 &x2, const X3 &x3, double delta=1e-5) |
| template<class X1 , class X2 , class X3 > | |
| internal::FixedSizeMatrix< X2, X2 >::type | gtsam::numericalHessian322 (std::function< double(const X1 &, const X2 &, const X3 &)> f, const X1 &x1, const X2 &x2, const X3 &x3, double delta=1e-5) |
| template<class X1 , class X2 , class X3 > | |
| internal::FixedSizeMatrix< X2, X2 >::type | gtsam::numericalHessian322 (double(*f)(const X1 &, const X2 &, const X3 &), const X1 &x1, const X2 &x2, const X3 &x3, double delta=1e-5) |
| template<class X1 , class X2 , class X3 > | |
| internal::FixedSizeMatrix< X2, X3 >::type | gtsam::numericalHessian323 (std::function< double(const X1 &, const X2 &, const X3 &)> f, const X1 &x1, const X2 &x2, const X3 &x3, double delta=1e-5) |
| template<class X1 , class X2 , class X3 > | |
| internal::FixedSizeMatrix< X2, X3 >::type | gtsam::numericalHessian323 (double(*f)(const X1 &, const X2 &, const X3 &), const X1 &x1, const X2 &x2, const X3 &x3, double delta=1e-5) |
| template<class X1 , class X2 , class X3 > | |
| internal::FixedSizeMatrix< X3, X3 >::type | gtsam::numericalHessian333 (std::function< double(const X1 &, const X2 &, const X3 &)> f, const X1 &x1, const X2 &x2, const X3 &x3, double delta=1e-5) |
| template<class X1 , class X2 , class X3 > | |
| internal::FixedSizeMatrix< X3, X3 >::type | gtsam::numericalHessian333 (double(*f)(const X1 &, const X2 &, const X3 &), const X1 &x1, const X2 &x2, const X3 &x3, double delta=1e-5) |
Detailed Description
Some functions to compute numerical derivatives.
Definition in file numericalDerivative.h.