Hybrid factor graph that uses type erasure. More...
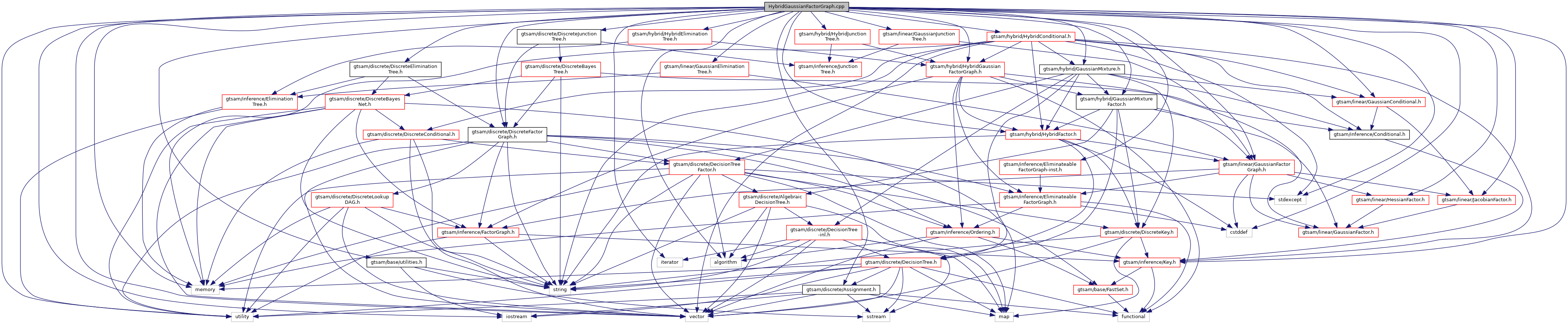
#include <gtsam/base/utilities.h>#include <gtsam/discrete/Assignment.h>#include <gtsam/discrete/DiscreteEliminationTree.h>#include <gtsam/discrete/DiscreteFactorGraph.h>#include <gtsam/discrete/DiscreteJunctionTree.h>#include <gtsam/hybrid/GaussianMixture.h>#include <gtsam/hybrid/GaussianMixtureFactor.h>#include <gtsam/hybrid/HybridConditional.h>#include <gtsam/hybrid/HybridEliminationTree.h>#include <gtsam/hybrid/HybridFactor.h>#include <gtsam/hybrid/HybridGaussianFactorGraph.h>#include <gtsam/hybrid/HybridJunctionTree.h>#include <gtsam/inference/EliminateableFactorGraph-inst.h>#include <gtsam/inference/Key.h>#include <gtsam/linear/GaussianConditional.h>#include <gtsam/linear/GaussianEliminationTree.h>#include <gtsam/linear/GaussianFactorGraph.h>#include <gtsam/linear/GaussianJunctionTree.h>#include <gtsam/linear/HessianFactor.h>#include <gtsam/linear/JacobianFactor.h>#include <algorithm>#include <cstddef>#include <iostream>#include <iterator>#include <memory>#include <stdexcept>#include <utility>#include <vector>
Include dependency graph for HybridGaussianFactorGraph.cpp:
Go to the source code of this file.
Namespaces | |
| gtsam | |
| traits | |
Typedefs | |
| using | gtsam::OrphanWrapper = BayesTreeOrphanWrapper< HybridBayesTree::Clique > |
Functions | |
| static GaussianFactorGraphTree | gtsam::addGaussian (const GaussianFactorGraphTree &gfgTree, const GaussianFactor::shared_ptr &factor) |
| static std::pair< HybridConditional::shared_ptr, std::shared_ptr< Factor > > | gtsam::continuousElimination (const HybridGaussianFactorGraph &factors, const Ordering &frontalKeys) |
| static std::pair< HybridConditional::shared_ptr, std::shared_ptr< Factor > > | gtsam::discreteElimination (const HybridGaussianFactorGraph &factors, const Ordering &frontalKeys) |
| std::pair< HybridConditional::shared_ptr, std::shared_ptr< Factor > > | gtsam::EliminateHybrid (const HybridGaussianFactorGraph &factors, const Ordering &keys) |
| Main elimination function for HybridGaussianFactorGraph. More... | |
| static std::pair< HybridConditional::shared_ptr, std::shared_ptr< Factor > > | gtsam::hybridElimination (const HybridGaussianFactorGraph &factors, const Ordering &frontalKeys, const KeyVector &continuousSeparator, const std::set< DiscreteKey > &discreteSeparatorSet) |
| const Ordering | gtsam::HybridOrdering (const HybridGaussianFactorGraph &graph) |
| Return a Colamd constrained ordering where the discrete keys are eliminated after the continuous keys. More... | |
| GaussianFactorGraphTree | gtsam::removeEmpty (const GaussianFactorGraphTree &sum) |
| static void | gtsam::throwRuntimeError (const std::string &s, const std::shared_ptr< Factor > &f) |
Detailed Description
Hybrid factor graph that uses type erasure.
- Date
- Mar 11, 2022
Definition in file HybridGaussianFactorGraph.cpp.