This class provides a unified experience for nodes, nodelets and filters for getting ROS parameter values. More...
#include <memory>#include <string>#include <utility>#include <cras_cpp_common/log_utils.h>#include <cras_cpp_common/param_utils.hpp>#include <cras_cpp_common/param_utils/get_param_adapter.hpp>#include <cras_cpp_common/param_utils/get_param_options.hpp>#include <cras_cpp_common/param_utils/get_param_result.hpp>#include <cras_cpp_common/optional.hpp>
Include dependency graph for param_utils/param_helper.hpp:

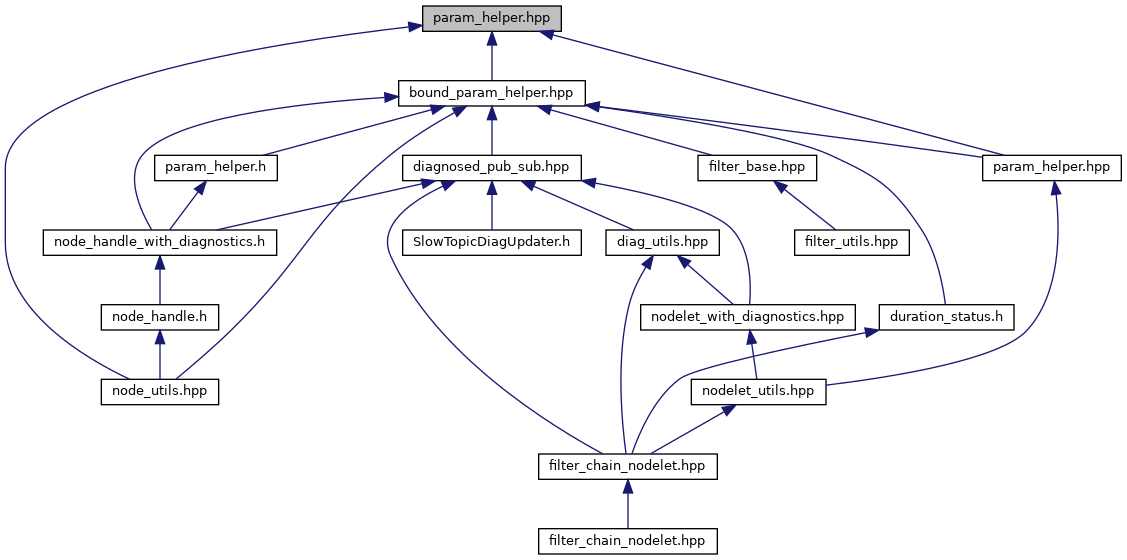
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | cras::ParamHelper |
| This class provides a unified experience for nodes, nodelets and filters for getting ROS parameter values. Each parameter has to be provided a default value, and each parameter read is logged - specified parameters with INFO verbosity level, defaulted parameters with WARN level. There are also lots of template specializations for builtin ROS types or unsigned values which ease the process of reading the parameters correctly. More... | |
Namespaces | |
| cras | |
Typedefs | |
| typedef ::std::shared_ptr<::cras::ParamHelper > | cras::ParamHelperPtr |
Detailed Description
This class provides a unified experience for nodes, nodelets and filters for getting ROS parameter values.
Definition in file param_utils/param_helper.hpp.