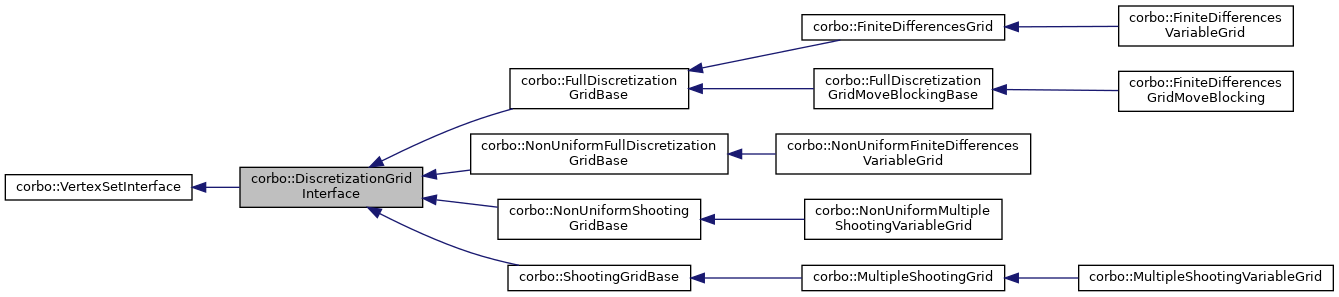
Generic interface class for discretization grids. More...
#include <discretization_grid_interface.h>
Public Types | |
| using | Ptr = std::shared_ptr< DiscretizationGridInterface > |
| using | UPtr = std::unique_ptr< DiscretizationGridInterface > |
 Public Types inherited from corbo::VertexSetInterface Public Types inherited from corbo::VertexSetInterface | |
| using | Ptr = std::shared_ptr< VertexSetInterface > |
Public Member Functions | |
| void | clear () override=0 |
| DiscretizationGridInterface ()=default | |
| DiscretizationGridInterface (int state_dim, int control_dim) | |
| virtual double | getFinalTime () const =0 |
| virtual bool | getFirstControlInput (Eigen::VectorXd &u0)=0 |
| virtual double | getFirstDt () const =0 |
| virtual double | getInitialDt () const =0 |
| virtual int | getInitialN () const =0 |
| virtual Ptr | getInstance () const =0 |
| Return a newly created shared instance of the implemented class. More... | |
| virtual int | getN () const =0 |
| virtual void | getStateAndControlTimeSeries (TimeSeries::Ptr x_sequence, TimeSeries::Ptr u_sequence, double t_max=CORBO_INF_DBL) const =0 |
| Return state and control trajectory as time series object (shared instance) More... | |
| virtual bool | hasConstantControls () const =0 |
| virtual bool | hasSingleDt () const =0 |
| virtual bool | isEmpty () const =0 |
| virtual bool | isTimeVariableGrid () const =0 |
| virtual bool | isUniformGrid () const =0 |
| virtual bool | providesStateTrajectory () const =0 |
| virtual void | setInitialDt (double dt)=0 |
| virtual void | setN (int n, bool try_resample=true)=0 |
| Return dimension of the control input dimension in the grid. More... | |
| virtual GridUpdateResult | update (const Eigen::VectorXd &x0, ReferenceTrajectoryInterface &xref, ReferenceTrajectoryInterface &uref, NlpFunctions &nlp_fun, OptimizationEdgeSet &edges, SystemDynamicsInterface::Ptr dynamics, bool new_run, const Time &t, ReferenceTrajectoryInterface *sref=nullptr, const Eigen::VectorXd *prev_u=nullptr, double prev_u_dt=0, ReferenceTrajectoryInterface *xinit=nullptr, ReferenceTrajectoryInterface *uinit=nullptr)=0 |
| virtual | ~DiscretizationGridInterface ()=default |
| Virtual destructor. More... | |
| Public Member Functions inherited from corbo::VertexSetInterface | |
| void | applyIncrementNonFixed (const Eigen::Ref< const Eigen::VectorXd > &increment) |
| Active vertices related methods. More... | |
| void | applyIncrementNonFixed (int idx, double increment) |
| void | backupParametersActiveVertices () |
| void | clearConnectedEdges () |
| void | computeVertexIndices () |
| Precompute vertex indices in the hyper-graph (e.g. for the Jacobian or Hessian structure) More... | |
| void | discardBackupParametersActiveVertices (bool all=false) |
| void | getBounds (Eigen::Ref< Eigen::VectorXd > lb, Eigen::Ref< Eigen::VectorXd > ub) |
| double | getLowerBound (int idx) |
| int | getParameterDimension () |
| double | getParameterValue (int idx) |
| void | getParameterVector (Eigen::Ref< Eigen::VectorXd > x) |
| double | getUpperBound (int idx) |
| bool | isModified () const |
| void | restoreBackupParametersActiveVertices (bool keep_backup) |
| void | setBounds (const Eigen::Ref< const Eigen::VectorXd > &lb, const Eigen::Ref< const Eigen::VectorXd > &ub) |
| void | setLowerBound (int idx, double lb) |
| void | setModified (bool modified) |
| void | setParameterValue (int idx, double x) |
| void | setParameterVector (const Eigen::Ref< const Eigen::VectorXd > &x) |
| void | setUpperBound (int idx, double ub) |
| VertexSetInterface () | |
| virtual | ~VertexSetInterface () |
| Virtual destructor. More... | |
Static Public Member Functions | |
| static Factory< DiscretizationGridInterface > & | getFactory () |
| Get access to the accociated factory. More... | |
Protected Member Functions | |
| void | computeActiveVertices () override=0 |
| std::vector< VertexInterface * > & | getActiveVertices () override=0 |
| void | getVertices (std::vector< VertexInterface *> &vertices) override=0 |
| void | setLastControlRef (const Eigen::VectorXd &last_u_ref) |
| void | setPreviousControl (const Eigen::VectorXd &prev_u, double prev_u_dt) |
| Protected Member Functions inherited from corbo::VertexSetInterface | |
| void | setVertexIdx (VertexInterface &vertex, int idx) |
Protected Attributes | |
| VectorVertex | _u_prev |
| ScalarVertex | _u_prev_dt |
| VectorVertex | _u_ref |
| Protected Attributes inherited from corbo::VertexSetInterface | |
| bool | _modified = true |
Detailed Description
Generic interface class for discretization grids.
This abstract class defines the interface for discretization grids. Discretization grids represent state and control sequences subject to optimziation. Usually, in direct optimal control, continuous-time trajectories are discretized in order to transform the optimization problem into a finite parameter nonlinear optimization problem, also called nonlinear program.
A discretization grid directly interacts with a Hyper-Graph to define the optimal control problem. Hence, the grid provides the relevant vertices (optimization parameters) and the corresponding edge creation.
- Remarks
- This interface is provided with factory support (DiscretizationGridFactory).
- See also
- HyperGraph
Definition at line 82 of file discretization_grid_interface.h.
Member Typedef Documentation
◆ Ptr
| using corbo::DiscretizationGridInterface::Ptr = std::shared_ptr<DiscretizationGridInterface> |
Definition at line 85 of file discretization_grid_interface.h.
◆ UPtr
| using corbo::DiscretizationGridInterface::UPtr = std::unique_ptr<DiscretizationGridInterface> |
Definition at line 86 of file discretization_grid_interface.h.
Constructor & Destructor Documentation
◆ DiscretizationGridInterface() [1/2]
|
default |
◆ DiscretizationGridInterface() [2/2]
◆ ~DiscretizationGridInterface()
|
virtualdefault |
Virtual destructor.
Member Function Documentation
◆ clear()
|
overridepure virtual |
◆ computeActiveVertices()
|
overrideprotectedpure virtual |
◆ getActiveVertices()
|
overrideprotectedpure virtual |
◆ getFactory()
|
inlinestatic |
Get access to the accociated factory.
Definition at line 106 of file discretization_grid_interface.h.
◆ getFinalTime()
|
pure virtual |
◆ getFirstControlInput()
|
pure virtual |
◆ getFirstDt()
|
pure virtual |
◆ getInitialDt()
|
pure virtual |
◆ getInitialN()
|
pure virtual |
◆ getInstance()
|
pure virtual |
Return a newly created shared instance of the implemented class.
Implemented in corbo::NonUniformShootingGridBase, corbo::ShootingGridBase, corbo::FullDiscretizationGridBase, corbo::NonUniformFullDiscretizationGridBase, corbo::FiniteDifferencesVariableGrid, corbo::MultipleShootingVariableGrid, corbo::NonUniformFiniteDifferencesVariableGrid, corbo::NonUniformMultipleShootingVariableGrid, corbo::FiniteDifferencesGrid, corbo::MultipleShootingGrid, corbo::FiniteDifferencesGridMoveBlocking, and corbo::FullDiscretizationGridMoveBlockingBase.
◆ getN()
|
pure virtual |
◆ getStateAndControlTimeSeries()
|
pure virtual |
Return state and control trajectory as time series object (shared instance)
Implemented in corbo::NonUniformShootingGridBase, corbo::ShootingGridBase, corbo::FullDiscretizationGridBase, corbo::NonUniformFullDiscretizationGridBase, and corbo::FullDiscretizationGridMoveBlockingBase.
◆ getVertices()
|
overrideprotectedpure virtual |
◆ hasConstantControls()
|
pure virtual |
◆ hasSingleDt()
|
pure virtual |
◆ isEmpty()
|
pure virtual |
◆ isTimeVariableGrid()
|
pure virtual |
◆ isUniformGrid()
|
pure virtual |
◆ providesStateTrajectory()
|
pure virtual |
◆ setInitialDt()
|
pure virtual |
◆ setLastControlRef()
|
inlineprotected |
Definition at line 161 of file discretization_grid_interface.h.
◆ setN()
|
pure virtual |
Return dimension of the control input dimension in the grid.
Implemented in corbo::NonUniformShootingGridBase, corbo::ShootingGridBase, corbo::FullDiscretizationGridBase, and corbo::NonUniformFullDiscretizationGridBase.
◆ setPreviousControl()
|
inlineprotected |
Definition at line 153 of file discretization_grid_interface.h.
◆ update()
|
pure virtual |
Member Data Documentation
◆ _u_prev
|
protected |
Definition at line 168 of file discretization_grid_interface.h.
◆ _u_prev_dt
|
protected |
Definition at line 169 of file discretization_grid_interface.h.
◆ _u_ref
|
protected |
Definition at line 170 of file discretization_grid_interface.h.
The documentation for this class was generated from the following file: