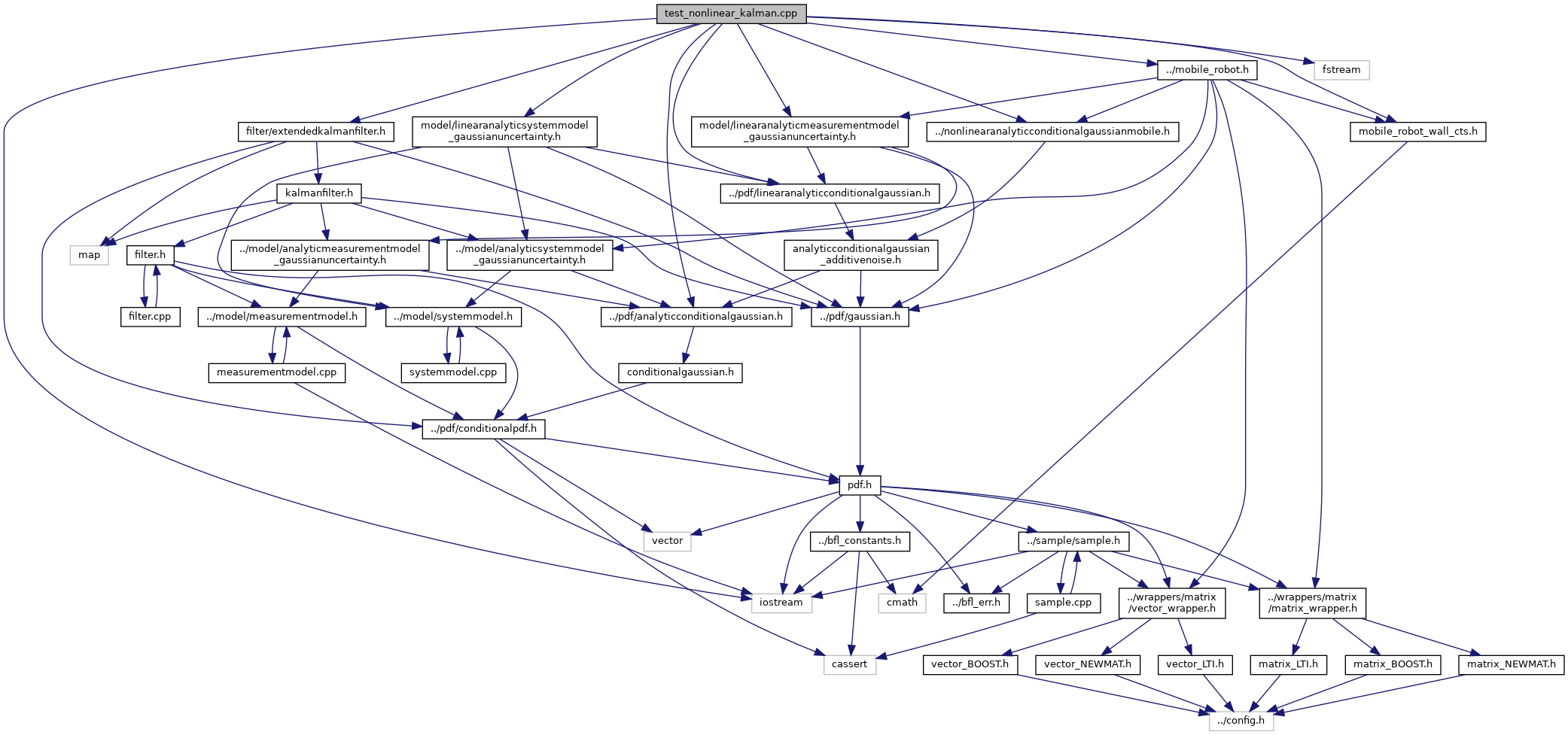
#include <filter/extendedkalmanfilter.h>#include <model/linearanalyticsystemmodel_gaussianuncertainty.h>#include <model/linearanalyticmeasurementmodel_gaussianuncertainty.h>#include <pdf/analyticconditionalgaussian.h>#include <pdf/linearanalyticconditionalgaussian.h>#include "../nonlinearanalyticconditionalgaussianmobile.h"#include "../mobile_robot.h"#include <iostream>#include <fstream>#include "../mobile_robot_wall_cts.h"
Include dependency graph for test_nonlinear_kalman.cpp:
Go to the source code of this file.
Functions | |
| int | main (int argc, char **argv) |
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 73 of file test_nonlinear_kalman.cpp.