Proposal Density for non-linear systems with additive Gaussian Noise (using a (analytic) Filter) More...
#include <filterproposaldensity.h>
Public Member Functions | |
| virtual MatrixWrapper::SymmetricMatrix | CovarianceGet () const |
| Get the Covariance Matrix E[(x - E[x])^2] of the Analytic pdf. More... | |
| virtual MatrixWrapper::Matrix | dfGet (unsigned int i) const |
| returns derivative from function to n-th conditional variable More... | |
| virtual MatrixWrapper::ColumnVector | ExpectedValueGet () const |
| Get the expected value E[x] of the pdf. More... | |
| FilterProposalDensity (AnalyticSystemModelGaussianUncertainty *SysModel, AnalyticMeasurementModelGaussianUncertainty *MeasModel) | |
| Constructor. More... | |
| FilterProposalDensity (const FilterProposalDensity &fpd) | |
| Copy constructor. More... | |
| void | MeasurementModelSet (AnalyticMeasurementModelGaussianUncertainty *MeasModel) |
| Set Measurementmodel. More... | |
| void | SampleCovSet (MatrixWrapper::SymmetricMatrix &cov) |
| Set SampleCov. More... | |
| void | SystemModelSet (AnalyticSystemModelGaussianUncertainty *SysModel) |
| Set SystemModel. More... | |
| virtual | ~FilterProposalDensity () |
| Destructor. More... | |
 Public Member Functions inherited from BFL::AnalyticConditionalGaussian Public Member Functions inherited from BFL::AnalyticConditionalGaussian | |
| AnalyticConditionalGaussian (int dim=0, int num_conditional_arguments=0) | |
| Constructor. More... | |
| virtual | ~AnalyticConditionalGaussian () |
| Destructor. More... | |
| Public Member Functions inherited from BFL::ConditionalGaussian | |
| virtual ConditionalGaussian * | Clone () const |
| Clone function. More... | |
| ConditionalGaussian (int dim=0, int num_conditional_arguments=0) | |
| Constructor. More... | |
| virtual Probability | ProbabilityGet (const MatrixWrapper::ColumnVector &input) const |
| Get the probability of a certain argument. More... | |
| virtual bool | SampleFrom (Sample< MatrixWrapper::ColumnVector > &sample, int method=DEFAULT, void *args=NULL) const |
| virtual bool | SampleFrom (std::vector< Sample< MatrixWrapper::ColumnVector > > &samples, const int num_samples, int method=DEFAULT, void *args=NULL) const |
| virtual | ~ConditionalGaussian () |
| Destructor. More... | |
| Public Member Functions inherited from BFL::ConditionalPdf< MatrixWrapper::ColumnVector, MatrixWrapper::ColumnVector > | |
| const MatrixWrapper::ColumnVector & | ConditionalArgumentGet (unsigned int n_argument) const |
| Get the n-th argument of the list. More... | |
| virtual void | ConditionalArgumentSet (unsigned int n_argument, const MatrixWrapper::ColumnVector &argument) |
| Set the n-th argument of the list. More... | |
| const std::vector< MatrixWrapper::ColumnVector > & | ConditionalArgumentsGet () const |
| Get the whole list of conditional arguments. More... | |
| virtual void | ConditionalArgumentsSet (std::vector< MatrixWrapper::ColumnVector > ConditionalArguments) |
| Set the whole list of conditional arguments. More... | |
| ConditionalPdf (int dimension=0, unsigned int num_conditional_arguments=0) | |
| Constructor. More... | |
| unsigned int | NumConditionalArgumentsGet () const |
| Get the Number of conditional arguments. More... | |
| virtual void | NumConditionalArgumentsSet (unsigned int numconditionalarguments) |
| Set the Number of conditional arguments. More... | |
| virtual | ~ConditionalPdf () |
| Destructor. More... | |
| Public Member Functions inherited from BFL::BFL::Pdf< MatrixWrapper::ColumnVector > | |
| unsigned int | DimensionGet () const |
| Get the dimension of the argument. More... | |
| virtual void | DimensionSet (unsigned int dim) |
| Set the dimension of the argument. More... | |
| Pdf (unsigned int dimension=0) | |
| Constructor. More... | |
| virtual bool | SampleFrom (vector< Sample< MatrixWrapper::ColumnVector > > &list_samples, const unsigned int num_samples, int method=DEFAULT, void *args=NULL) const |
| Draw multiple samples from the Pdf (overloaded) More... | |
| virtual bool | SampleFrom (Sample< MatrixWrapper::ColumnVector > &one_sample, int method=DEFAULT, void *args=NULL) const |
| Draw 1 sample from the Pdf: More... | |
| virtual | ~Pdf () |
| Destructor. More... | |
Protected Member Functions | |
| virtual void | FilterStep () const |
| internal method More... | |
Protected Attributes | |
| Filter< MatrixWrapper::ColumnVector, MatrixWrapper::ColumnVector > * | _filter |
| AnalyticMeasurementModelGaussianUncertainty * | _measmodel |
| MatrixWrapper::SymmetricMatrix | _sample_cov |
| AnalyticSystemModelGaussianUncertainty * | _sysmodel |
| Gaussian * | _TmpPrior |
| Protected Attributes inherited from BFL::ConditionalGaussian | |
| ColumnVector | _diff |
| Matrix | _Low_triangle |
| ColumnVector | _Mu |
| ColumnVector | _samples |
| ColumnVector | _SampleValue |
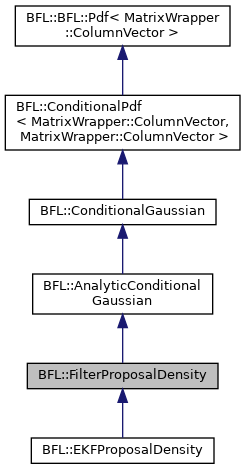
Detailed Description
Proposal Density for non-linear systems with additive Gaussian Noise (using a (analytic) Filter)
Calculates an importance density for all systems of the form
![\[ x_k = f(x_{k-1}[,u_k]) + v_k, \quad v_k \sim N(0, \Sigma_v) \]](form_49.png)
![\[ z_k = h(x_k[,s_k]) + w_k, \quad w_k \sim N(0, \Sigma_w) \]](form_50.png)
This means all systems with a system equation and measurement equation that use a AnalyticConditionalGaussian Class. It uses a Filter to generate a proposal
Definition at line 40 of file filterproposaldensity.h.
Constructor & Destructor Documentation
◆ FilterProposalDensity() [1/2]
| BFL::FilterProposalDensity::FilterProposalDensity | ( | AnalyticSystemModelGaussianUncertainty * | SysModel, |
| AnalyticMeasurementModelGaussianUncertainty * | MeasModel | ||
| ) |
Constructor.
- Parameters
-
SysModel MeasModel
◆ FilterProposalDensity() [2/2]
| BFL::FilterProposalDensity::FilterProposalDensity | ( | const FilterProposalDensity & | fpd | ) |
◆ ~FilterProposalDensity()
|
virtual |
Destructor.
Member Function Documentation
◆ CovarianceGet()
|
virtual |
Get the Covariance Matrix E[(x - E[x])^2] of the Analytic pdf.
Get first order statistic (Covariance) of this AnalyticPdf
- Returns
- The Covariance of the Pdf (a SymmetricMatrix of dim DIMENSION)
- Todo:
- extend this more general to n-th order statistic
- Bug:
- Discrete pdfs should not be able to use this!
Reimplemented from BFL::BFL::Pdf< MatrixWrapper::ColumnVector >.
◆ dfGet()
|
virtual |
returns derivative from function to n-th conditional variable
- Parameters
-
i Number of the conditional variable to use for partial derivation
- Returns
- Partial derivative with respect to conditional variable i
Reimplemented from BFL::AnalyticConditionalGaussian.
◆ ExpectedValueGet()
|
virtual |
Get the expected value E[x] of the pdf.
Get low order statistic (Expected Value) of this AnalyticPdf
- Returns
- The Expected Value of the Pdf (a ColumnVector with DIMENSION rows)
- Note
- No set functions here! This can be useful for analytic functions, but not for sample based representations!
- For certain discrete Pdfs, this function has no meaning, what is the average between yes and no?
Reimplemented from BFL::BFL::Pdf< MatrixWrapper::ColumnVector >.
◆ FilterStep()
|
protectedvirtual |
internal method
◆ MeasurementModelSet()
| void BFL::FilterProposalDensity::MeasurementModelSet | ( | AnalyticMeasurementModelGaussianUncertainty * | MeasModel | ) |
Set Measurementmodel.
- Parameters
-
MeasModel
◆ SampleCovSet()
| void BFL::FilterProposalDensity::SampleCovSet | ( | MatrixWrapper::SymmetricMatrix & | cov | ) |
Set SampleCov.
- Parameters
-
cov
◆ SystemModelSet()
| void BFL::FilterProposalDensity::SystemModelSet | ( | AnalyticSystemModelGaussianUncertainty * | SysModel | ) |
Set SystemModel.
- Parameters
-
SysModel
Member Data Documentation
◆ _filter
|
mutableprotected |
Definition at line 82 of file filterproposaldensity.h.
◆ _measmodel
|
protected |
Definition at line 85 of file filterproposaldensity.h.
◆ _sample_cov
|
protected |
Definition at line 87 of file filterproposaldensity.h.
◆ _sysmodel
|
protected |
Definition at line 84 of file filterproposaldensity.h.
◆ _TmpPrior
|
mutableprotected |
Definition at line 81 of file filterproposaldensity.h.
The documentation for this class was generated from the following file: