#include "config.h"#include <gtest/gtest.h>#include "ros_type_introspection/ros_introspection.hpp"#include <sensor_msgs/JointState.h>#include <sensor_msgs/NavSatStatus.h>#include <sensor_msgs/Imu.h>#include <sensor_msgs/Image.h>#include <std_msgs/Int16MultiArray.h>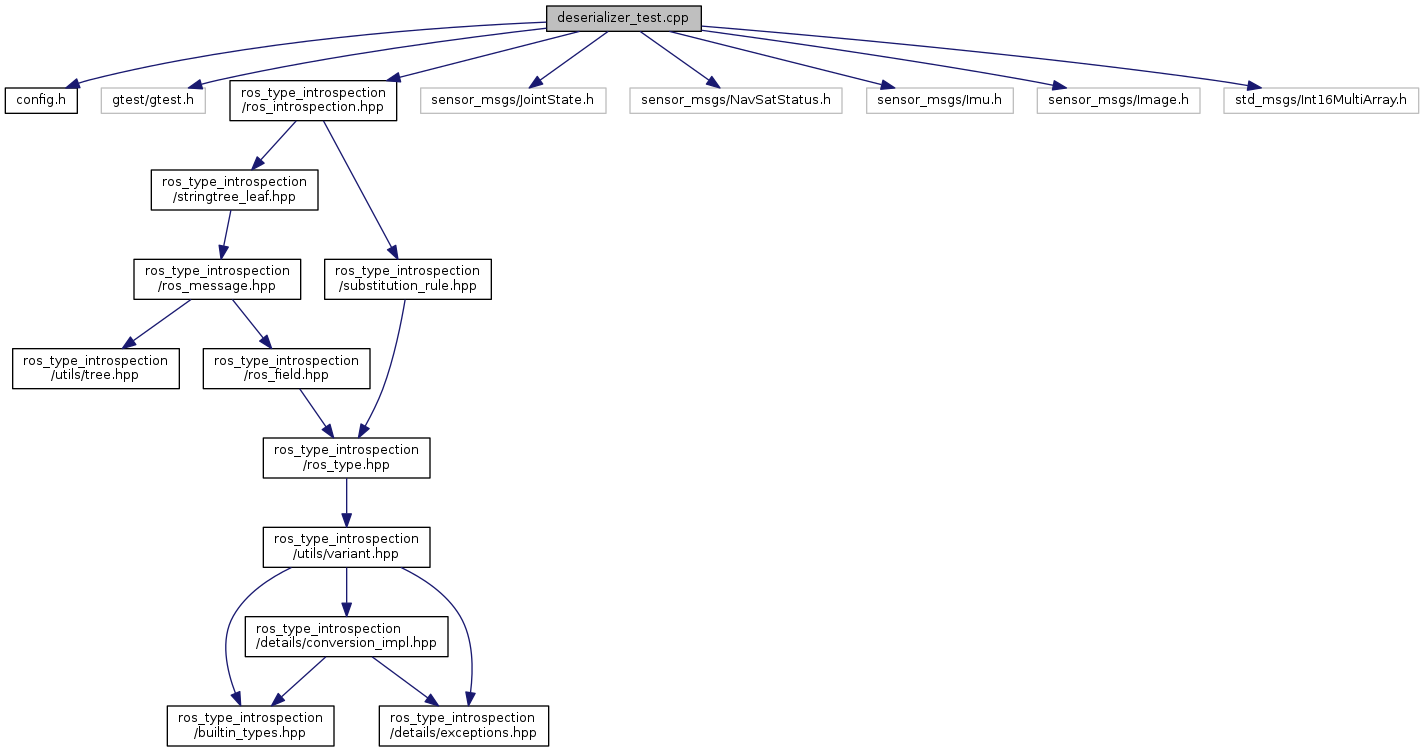
Go to the source code of this file.
Functions | |
| std::vector< uint8_t > | buffer (ros::serialization::serializationLength(imu)) |
| std::vector< uint8_t > | buffer (ros::serialization::serializationLength(multi_array)) |
| std::vector< uint8_t > | buffer (ros::serialization::serializationLength(image)) |
| parser | deserializeIntoFlatContainer ("imu", absl::Span< uint8_t >(buffer),&flat_container, 100) |
| EXPECT_EQ (flat_container.value[index].first.toStdString(),("imu/header/seq")) | |
| EXPECT_EQ (flat_container.value[index].second.convert< int >(), 2016) | |
| EXPECT_EQ (flat_container.value[index].first.toStdString(),("imu/header/stamp")) | |
| EXPECT_EQ (flat_container.value[index].second.convert< double >(), double(1234.567)) | |
| EXPECT_EQ (flat_container.value[index].second.convert< ros::Time >(), imu.header.stamp) | |
| EXPECT_EQ (flat_container.value[index].first.toStdString(),("imu/orientation/x")) | |
| EXPECT_EQ (flat_container.value[index].second.convert< int >(), 11) | |
| EXPECT_EQ (flat_container.value[index].first.toStdString(),("imu/orientation/y")) | |
| EXPECT_EQ (flat_container.value[index].second.convert< int >(), 12) | |
| EXPECT_EQ (flat_container.value[index].first.toStdString(),("imu/orientation/z")) | |
| EXPECT_EQ (flat_container.value[index].second.convert< int >(), 13) | |
| EXPECT_EQ (flat_container.value[index].first.toStdString(),("imu/orientation/w")) | |
| EXPECT_EQ (flat_container.value[index].second.convert< int >(), 14) | |
| EXPECT_EQ (flat_container.value[index].first.toStdString(),("imu/angular_velocity/x")) | |
| EXPECT_EQ (flat_container.value[index].second.convert< int >(), 21) | |
| EXPECT_EQ (flat_container.value[index].first.toStdString(),("imu/angular_velocity/y")) | |
| EXPECT_EQ (flat_container.value[index].second.convert< int >(), 22) | |
| EXPECT_EQ (flat_container.value[index].first.toStdString(),("imu/angular_velocity/z")) | |
| EXPECT_EQ (flat_container.value[index].second.convert< int >(), 23) | |
| EXPECT_EQ (flat_container.value[index].first.toStdString(),("imu/linear_acceleration/x")) | |
| EXPECT_EQ (flat_container.value[index].second.convert< int >(), 31) | |
| EXPECT_EQ (flat_container.value[index].first.toStdString(),("imu/linear_acceleration/y")) | |
| EXPECT_EQ (flat_container.value[index].second.convert< int >(), 32) | |
| EXPECT_EQ (flat_container.value[index].first.toStdString(),("imu/linear_acceleration/z")) | |
| EXPECT_EQ (flat_container.value[index].second.convert< int >(), 33) | |
| EXPECT_NO_THROW (parser.deserializeIntoFlatContainer("multi_array", absl::Span< uint8_t >(buffer),&flat_container, 100)) | |
| EXPECT_NO_THROW (parser.deserializeIntoFlatContainer("image_raw", absl::Span< uint8_t >(buffer),&flat_container, 100)) | |
| for (int i=0;i< 9;i++) | |
| if (VERBOSE_TEST) | |
| int | main (int argc, char **argv) |
| parser | registerMessageDefinition ("imu", ROSType(DataType< sensor_msgs::Imu >::value()), Definition< sensor_msgs::Imu >::value()) |
| parser | registerMessageDefinition ("multi_array", ROSType(DataType< std_msgs::Int16MultiArray >::value()), Definition< std_msgs::Int16MultiArray >::value()) |
| parser | registerMessageDefinition ("image_raw", ROSType(DataType< sensor_msgs::Image >::value()), Definition< sensor_msgs::Image >::value()) |
| multi_array data | resize (N) |
| image data | resize (image.height *image.step) |
| ros::serialization::OStream | stream (buffer.data(), buffer.size()) |
| TEST (Deserialize, JointState) | |
| TEST (Deserialize, NavSatStatus) | |
Variables | |
| multi_array layout | data_offset = 42 |
| FlatMessage | flat_container |
| imu header | frame_id = "pippo" |
| image | height = 480 |
| sensor_msgs::Image | image |
| sensor_msgs::Imu | imu |
| int | index = 0 |
| std_msgs::Int16MultiArray | multi_array |
| const unsigned | N = 6 |
| imu header stamp | nsec = 567*1000*1000 |
| imu header stamp | sec = 1234 |
| imu header | seq = 2016 |
| image | step = 3*image.width |
| imu orientation | w = 14 |
| image | width = 640 |
| imu orientation | x = 11 |
| imu orientation | y = 12 |
| imu orientation | z = 13 |
Function Documentation
| std::vector<uint8_t> buffer | ( | ros::serialization::serializationLength(imu) | ) |
| std::vector<uint8_t> buffer | ( | ros::serialization::serializationLength(multi_array) | ) |
| std::vector<uint8_t> buffer | ( | ros::serialization::serializationLength(image) | ) |
| parser deserializeIntoFlatContainer | ( | "imu" | , |
| absl::Span< uint8_t > | buffer, | ||
| & | flat_container, | ||
| 100 | |||
| ) |
| EXPECT_EQ | ( | flat_container.value.second.convert< int > | ()[index], |
| 2016 | |||
| ) |
| EXPECT_EQ | ( | flat_container.value.first. | toStdString()[index], |
| ("imu/header/stamp") | |||
| ) |
| EXPECT_EQ | ( | flat_container.value.second.convert< double > | ()[index], |
| double(1234.567) | |||
| ) |
| EXPECT_EQ | ( | flat_container.value.second.convert< ros::Time > | ()[index], |
| imu.header. | stamp | ||
| ) |
| EXPECT_EQ | ( | flat_container.value.first. | toStdString()[index], |
| ("imu/orientation/x") | |||
| ) |
| EXPECT_EQ | ( | flat_container.value.second.convert< int > | ()[index], |
| 11 | |||
| ) |
| EXPECT_EQ | ( | flat_container.value.first. | toStdString()[index], |
| ("imu/orientation/y") | |||
| ) |
| EXPECT_EQ | ( | flat_container.value.second.convert< int > | ()[index], |
| 12 | |||
| ) |
| EXPECT_EQ | ( | flat_container.value.first. | toStdString()[index], |
| ("imu/orientation/z") | |||
| ) |
| EXPECT_EQ | ( | flat_container.value.second.convert< int > | ()[index], |
| 13 | |||
| ) |
| EXPECT_EQ | ( | flat_container.value.first. | toStdString()[index], |
| ("imu/orientation/w") | |||
| ) |
| EXPECT_EQ | ( | flat_container.value.second.convert< int > | ()[index], |
| 14 | |||
| ) |
| EXPECT_EQ | ( | flat_container.value.first. | toStdString()[index], |
| ("imu/angular_velocity/x") | |||
| ) |
| EXPECT_EQ | ( | flat_container.value.second.convert< int > | ()[index], |
| 21 | |||
| ) |
| EXPECT_EQ | ( | flat_container.value.first. | toStdString()[index], |
| ("imu/angular_velocity/y") | |||
| ) |
| EXPECT_EQ | ( | flat_container.value.second.convert< int > | ()[index], |
| 22 | |||
| ) |
| EXPECT_EQ | ( | flat_container.value.first. | toStdString()[index], |
| ("imu/angular_velocity/z") | |||
| ) |
| EXPECT_EQ | ( | flat_container.value.second.convert< int > | ()[index], |
| 23 | |||
| ) |
| EXPECT_EQ | ( | flat_container.value.first. | toStdString()[index], |
| ("imu/linear_acceleration/x") | |||
| ) |
| EXPECT_EQ | ( | flat_container.value.second.convert< int > | ()[index], |
| 31 | |||
| ) |
| EXPECT_EQ | ( | flat_container.value.first. | toStdString()[index], |
| ("imu/linear_acceleration/y") | |||
| ) |
| EXPECT_EQ | ( | flat_container.value.second.convert< int > | ()[index], |
| 32 | |||
| ) |
| EXPECT_EQ | ( | flat_container.value.first. | toStdString()[index], |
| ("imu/linear_acceleration/z") | |||
| ) |
| EXPECT_EQ | ( | flat_container.value.second.convert< int > | ()[index], |
| 33 | |||
| ) |
| EXPECT_NO_THROW | ( | parser. | deserializeIntoFlatContainer"multi_array", absl::Span< uint8_t >(buffer),&flat_container, 100 | ) |
| EXPECT_NO_THROW | ( | parser. | deserializeIntoFlatContainer"image_raw", absl::Span< uint8_t >(buffer),&flat_container, 100 | ) |
| for | ( | ) |
Definition at line 237 of file deserializer_test.cpp.
| if | ( | VERBOSE_TEST | ) |
Definition at line 252 of file deserializer_test.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 459 of file deserializer_test.cpp.
| parser registerMessageDefinition | ( | "imu" | , |
| ROSType(DataType< sensor_msgs::Imu >::value()) | , | ||
| Definition< sensor_msgs::Imu > | ::value() | ||
| ) |
| parser registerMessageDefinition | ( | "multi_array" | , |
| ROSType(DataType< std_msgs::Int16MultiArray >::value()) | , | ||
| Definition< std_msgs::Int16MultiArray > | ::value() | ||
| ) |
| parser registerMessageDefinition | ( | "image_raw" | , |
| ROSType(DataType< sensor_msgs::Image >::value()) | , | ||
| Definition< sensor_msgs::Image > | ::value() | ||
| ) |
| multi_array data resize | ( | N | ) |
| image data resize | ( | image.height *image. | step | ) |
| ros::serialization::OStream stream | ( | buffer. | data(), |
| buffer. | size() | ||
| ) |
| TEST | ( | Deserialize | , |
| JointState | |||
| ) |
Definition at line 15 of file deserializer_test.cpp.
| TEST | ( | Deserialize | , |
| NavSatStatus | |||
| ) |
Definition at line 170 of file deserializer_test.cpp.
Variable Documentation
| multi_array layout data_offset = 42 |
Definition at line 400 of file deserializer_test.cpp.
| FlatMessage flat_container |
Definition at line 248 of file deserializer_test.cpp.
Definition at line 222 of file deserializer_test.cpp.
| image height = 480 |
Definition at line 439 of file deserializer_test.cpp.
| sensor_msgs::Image image |
Definition at line 437 of file deserializer_test.cpp.
| sensor_msgs::Imu imu |
Definition at line 217 of file deserializer_test.cpp.
| index = 0 |
Definition at line 260 of file deserializer_test.cpp.
| std_msgs::Int16MultiArray multi_array |
Definition at line 397 of file deserializer_test.cpp.
| const unsigned N = 6 |
Definition at line 399 of file deserializer_test.cpp.
Definition at line 221 of file deserializer_test.cpp.
Definition at line 220 of file deserializer_test.cpp.
Definition at line 219 of file deserializer_test.cpp.
| image step = 3*image.width |
Definition at line 440 of file deserializer_test.cpp.
| imu orientation w = 14 |
Definition at line 227 of file deserializer_test.cpp.
| image width = 640 |
Definition at line 438 of file deserializer_test.cpp.
| imu linear_acceleration x = 11 |
Definition at line 224 of file deserializer_test.cpp.
| imu linear_acceleration y = 12 |
Definition at line 225 of file deserializer_test.cpp.
| imu linear_acceleration z = 13 |
Definition at line 226 of file deserializer_test.cpp.