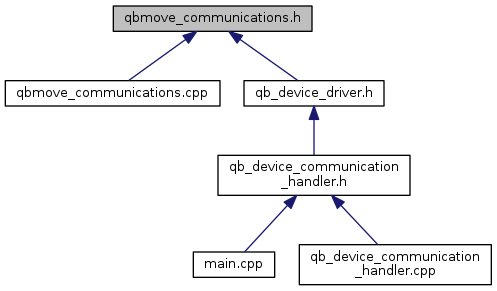
Library of functions for SERIAL PORT communication with a qbMove. More...

Go to the source code of this file.
Classes | |
| struct | comm_settings |
Macros | |
| #define | BAUD_RATE_T_2000000 0 |
| #define | BAUD_RATE_T_460800 1 |
| #define | INVALID_HANDLE_VALUE -1 |
| #define | MAX_WATCHDOG_TIME 500 |
| #define | READ_TIMEOUT 4000 |
Typedefs | |
| typedef struct comm_settings | comm_settings |
Functions | |
Virtual COM (RS485) functions | |
| int | RS485listPorts (char list_of_ports[10][255]) |
| This function is used to return a list of available serial ports. More... | |
| void | openRS485 (comm_settings *comm_settings_t, const char *port_s, int BAUD_RATE=B2000000) |
| This function is used to open a serial port for using with the qbMove or the qbHand. More... | |
| void | closeRS485 (comm_settings *comm_settings_t) |
| This function is used to close a serial port being used with the qbMove or an qbHand. More... | |
| int | RS485read (comm_settings *comm_settings_t, int id, char *package) |
| This function is used to read a package from the device. More... | |
| int | RS485ListDevices (comm_settings *comm_settings_t, char list_of_ids[255]) |
| This function is used to list the number of devices connected to the serial port and get their relative IDs. More... | |
| void | RS485GetInfo (comm_settings *comm_settings_t, char *buffer) |
| This function is used to ping the serial port for a qbMove or a qbHand and to get information about the device. More... | |
qbAPI Commands | |
| int | commPing (comm_settings *comm_settings_t, int id) |
| This function is used to ping the qbMove or the qbHand. More... | |
| void | commActivate (comm_settings *comm_settings_t, int id, char activate) |
| This function activates or deactivates a qbMove or a qbHand connected to the serial port. More... | |
| void | commSetBaudRate (comm_settings *comm_settings_t, int id, short int baudrate) |
| This function sets the baudrate of communication. More... | |
| void | commSetWatchDog (comm_settings *comm_settings_t, int id, short int wdt) |
| This function sets watchdog timer of a qbMove or a qbHand. More... | |
| void | commSetInputs (comm_settings *comm_settings_t, int id, short int inputs[]) |
| This function send reference inputs to a qbMove or a qbHand connected to the serial port. More... | |
| int | commSetInputsAck (comm_settings *comm_settings_t, int id, short int inputs[]) |
| This function send reference inputs to a qbMove or a qbHand connected to the serial port and expects an acknowledgment reply from the device. More... | |
| void | commSetPosStiff (comm_settings *comm_settings_t, int id, short int inputs[]) |
| This function send reference inputs to a qbMove connected to the serial port. More... | |
| int | commGetInputs (comm_settings *comm_settings_t, int id, short int inputs[2]) |
| This function gets input references from a qbMove or a qbHand connected to the serial port. More... | |
| int | commGetMeasurements (comm_settings *comm_settings_t, int id, short int measurements[3]) |
| This function gets position measurements from a qbMove or a qbHand connected to the serial port. More... | |
| int | commGetCounters (comm_settings *comm_settings_t, int id, short unsigned int counters[20]) |
| This function gets counters values from a qbMove connected to the serial port. More... | |
| int | commGetCurrents (comm_settings *comm_settings_t, int id, short int currents[2]) |
| This function gets currents from a qbMove or a qbHand connected to the serial port. More... | |
| int | commGetCurrAndMeas (comm_settings *comm_settings_t, int id, short int *values) |
| This function gets currents and position measurements from a qbMove or a qbHand connected to the serial port. More... | |
| int | commGetEmg (comm_settings *comm_settings_t, int id, short int emg[2]) |
| This function gets measurements from electomyographics sensors connected to the qbHand. More... | |
| int | commGetVelocities (comm_settings *comm_settings_t, int id, short int measurements[]) |
| This function gets velocities of the two motors and the shaft from a qbMove connected to a serial port or from the only shaft of the qbHand. More... | |
| int | commGetAccelerations (comm_settings *comm_settings_t, int id, short int measurements[]) |
| This function gets the acceleration of the qbHand motor. More... | |
| int | commGetActivate (comm_settings *comm_settings_t, int id, char *activate) |
| This function gets the activation status of a qbMove or a qbHand connected to the serial port. More... | |
| int | commGetInfo (comm_settings *comm_settings_t, int id, short int info_type, char *info) |
| This function is used to ping the qbMove or the qbHand and get information about the device. More... | |
| int | commBootloader (comm_settings *comm_settings_t, int id) |
| This function sends the board in bootloader modality in order to update the firmware on the board. More... | |
| int | commCalibrate (comm_settings *comm_settings_t, int id) |
| This function is used to calibrate the maximum stiffness value of the qbMove. More... | |
| int | commHandCalibrate (comm_settings *comm_settings_t, int id, short int speed, short int repetitions) |
| This function is used to make a series of opening and closures of the qbHand. More... | |
qbAPI Parameters | |
| int | commSetZeros (comm_settings *comm_settings_t, int id, void *values, unsigned short num_of_values) |
| This function sets the encoders's zero positon value that remains stored in the qbMove or qbHand memory. More... | |
| int | commGetParamList (comm_settings *comm_settings_t, int id, unsigned short index, void *values, unsigned short value_size, unsigned short num_of_values, uint8_t *buffer) |
| This function gets all the parameters that are stored in the qbMove or qbHand memory and sets one of them if requested. More... | |
| int | commStoreParams (comm_settings *comm_settings_t, int id) |
| This function stores all parameters that were set in the qbMove or the qbHand memory. More... | |
| int | commStoreDefaultParams (comm_settings *comm_settings_t, int id) |
| This function stores the factory default parameters. More... | |
| int | commRestoreParams (comm_settings *comm_settings_t, int id) |
| This function restores the factory default parameters. More... | |
| int | commInitMem (comm_settings *comm_settings_t, int id) |
| This function initialize the EEPROM memory of the board by loading the default factory parameters. More... | |
General Functions | |
| long | timevaldiff (struct timeval *starttime, struct timeval *finishtime) |
| This functions returns a difference between two timeval structures in order to obtain time elapsed between the two timeval;. More... | |
| char | checksum (char *data_buffer, int data_length) |
| This functions returns an 8 bit LCR checksum over the lenght of a buffer. More... | |
Functions for other devices | |
| int | commExtDrive (comm_settings *comm_settings_t, int id, char ext_input) |
| This function is used with the armslider device. More... | |
| void | commSetCuffInputs (comm_settings *comm_settings_t, int id, int flag) |
| This function send reference inputs to a qbMove board connected to the serial port. More... | |
| int | commGetJoystick (comm_settings *comm_settings_t, int id, short int joystick[2]) |
| This function gets joystick measurementes from a softhand connected to the serial port. More... | |
Detailed Description
Library of functions for SERIAL PORT communication with a qbMove.
Function Prototypes.
This library contains all necessary functions for communicating with a qbMove when using a USB to RS485 connector that provides a Virtual COM interface.
Definition in file qbmove_communications.h.
Macro Definition Documentation
| #define BAUD_RATE_T_2000000 0 |
Definition at line 79 of file qbmove_communications.h.
| #define BAUD_RATE_T_460800 1 |
Definition at line 80 of file qbmove_communications.h.
| #define INVALID_HANDLE_VALUE -1 |
Definition at line 72 of file qbmove_communications.h.
| #define MAX_WATCHDOG_TIME 500 |
Definition at line 81 of file qbmove_communications.h.
| #define READ_TIMEOUT 4000 |
Definition at line 82 of file qbmove_communications.h.
Typedef Documentation
| typedef struct comm_settings comm_settings |
Definition at line 92 of file qbmove_communications.h.
Function Documentation
| char checksum | ( | char * | data_buffer, |
| int | data_length | ||
| ) |
| void closeRS485 | ( | comm_settings * | comm_settings_t | ) |
This function is used to close a serial port being used with the qbMove or an qbHand.
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings.
- Example
| void commActivate | ( | comm_settings * | comm_settings_t, |
| int | id, | ||
| char | activate | ||
| ) |
This function activates or deactivates a qbMove or a qbHand connected to the serial port.
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings. id The device's id number. activate TRUE to turn motors on. FALSE to turn motors off.
- Example
| int commBootloader | ( | comm_settings * | comm_settings_t, |
| int | id | ||
| ) |
This function sends the board in bootloader modality in order to update the firmware on the board.
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings. id The device's id number.
- Returns
- Return 0 on success, -1 otherwise
- Example
| int commCalibrate | ( | comm_settings * | comm_settings_t, |
| int | id | ||
| ) |
This function is used to calibrate the maximum stiffness value of the qbMove.
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings. id The device's id number.
- Returns
- Returns 0 on success, -1 otherwise
- Example
| int commExtDrive | ( | comm_settings * | comm_settings_t, |
| int | id, | ||
| char | ext_input | ||
| ) |
This function is used with the armslider device.
Is used to drive another board with the inputs of the first one
- Parameters
-
comm_settings_t A comm_settings structure containing info about the comunication settings. id The id of the board drive. ext_input A flag used to activate the external drive functionality of the board.
- Returns
- A negative value if something went wrong, a zero if everything went fine.
| int commGetAccelerations | ( | comm_settings * | comm_settings_t, |
| int | id, | ||
| short int | measurements[] | ||
| ) |
This function gets the acceleration of the qbHand motor.
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings. id The device's id number. measurements Velocity measurements.
- Returns
- Returns 0 if communication was ok, -1 otherwise.
| int commGetActivate | ( | comm_settings * | comm_settings_t, |
| int | id, | ||
| char * | activate | ||
| ) |
This function gets the activation status of a qbMove or a qbHand connected to the serial port.
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings. id The device's id number. activation Activation status.
- Returns
- Returns 0 if communication was ok, -1 otherwise.
- Example
| int commGetCounters | ( | comm_settings * | comm_settings_t, |
| int | id, | ||
| short unsigned int | counters[20] | ||
| ) |
This function gets counters values from a qbMove connected to the serial port.
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings. id The device's id number. counters Counters
- Returns
- Returns 0 if communication was ok, -1 otherwise.
- Example
| int commGetCurrAndMeas | ( | comm_settings * | comm_settings_t, |
| int | id, | ||
| short int * | values | ||
| ) |
This function gets currents and position measurements from a qbMove or a qbHand connected to the serial port.
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings. id The device's id number. values Current and position measurements. Currents are in first two positions
- Returns
- Returns 0 if communication was ok, -1 otherwise.
- Example
| int commGetCurrents | ( | comm_settings * | comm_settings_t, |
| int | id, | ||
| short int | currents[2] | ||
| ) |
This function gets currents from a qbMove or a qbHand connected to the serial port.
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings. id The device's id number. currents Currents.
- Returns
- Returns 0 if communication was ok, -1 otherwise.
- Example
| int commGetEmg | ( | comm_settings * | comm_settings_t, |
| int | id, | ||
| short int | emg[2] | ||
| ) |
This function gets measurements from electomyographics sensors connected to the qbHand.
IS USED ONLY WHEN THE BOARD IS USED FOR A QBHAND
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings. id The device's id number. values Emg sensors measurements.
- Returns
- Returns 0 if communication was ok, -1 otherwise.
- Example
| int commGetInfo | ( | comm_settings * | comm_settings_t, |
| int | id, | ||
| short int | info_type, | ||
| char * | info | ||
| ) |
This function is used to ping the qbMove or the qbHand and get information about the device.
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings. id The device's id number. buffer Buffer that stores a string with information about the device. BUFFER SIZE MUST BE AT LEAST 500. info_type Information to be retrieved.
- Example
| int commGetInputs | ( | comm_settings * | comm_settings_t, |
| int | id, | ||
| short int | inputs[2] | ||
| ) |
This function gets input references from a qbMove or a qbHand connected to the serial port.
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings. id The device's id number. inputs Input references.
- Returns
- Returns 0 if communication was ok, -1 otherwise.
- Example
| int commGetJoystick | ( | comm_settings * | comm_settings_t, |
| int | id, | ||
| short int | joystick[2] | ||
| ) |
This function gets joystick measurementes from a softhand connected to the serial port.
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings. id The device's id number. joystick Joystick analog measurements.
- Returns
- Returns 0 if communication was ok, -1 otherwise.
- Example
| int commGetMeasurements | ( | comm_settings * | comm_settings_t, |
| int | id, | ||
| short int | measurements[3] | ||
| ) |
This function gets position measurements from a qbMove or a qbHand connected to the serial port.
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings. id The device's id number. measurements Measurements.
- Returns
- Returns 0 if communication was ok, -1 otherwise.
- Example
| int commGetParamList | ( | comm_settings * | comm_settings_t, |
| int | id, | ||
| unsigned short | index, | ||
| void * | values, | ||
| unsigned short | value_size, | ||
| unsigned short | num_of_values, | ||
| uint8_t * | buffer | ||
| ) |
This function gets all the parameters that are stored in the qbMove or qbHand memory and sets one of them if requested.
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings. id The device's id number. index The index relative to the parameter to be get. values An array with the parameter values. value_size The byte size of the parameter to be get num_of_values The size of the array of the parameter to be get buffer The array where the parameters' values and descriptions are saved
| int commGetVelocities | ( | comm_settings * | comm_settings_t, |
| int | id, | ||
| short int | measurements[] | ||
| ) |
This function gets velocities of the two motors and the shaft from a qbMove connected to a serial port or from the only shaft of the qbHand.
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings. id The device's id number. measurements Velocity measurements.
- Returns
- Returns 0 if communication was ok, -1 otherwise.
| int commHandCalibrate | ( | comm_settings * | comm_settings_t, |
| int | id, | ||
| short int | speed, | ||
| short int | repetitions | ||
| ) |
This function is used to make a series of opening and closures of the qbHand.
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings. id The device's id number. speed The speed of hand closure and opening [0 - 200] repetitions The nnumber of closures needed to be done [0 - 32767]
- Example
| int commInitMem | ( | comm_settings * | comm_settings_t, |
| int | id | ||
| ) |
This function initialize the EEPROM memory of the board by loading the default factory parameters.
After the initialization a flag is set.
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings. id The device's id number.
- Example
| int commPing | ( | comm_settings * | comm_settings_t, |
| int | id | ||
| ) |
This function is used to ping the qbMove or the qbHand.
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings. id The device's id number. buffer Buffer that stores a string with information about the device. BUFFER SIZE MUST BE AT LEAST 500.
- Returns
- Returns 0 if ping was ok, -1 otherwise.
- Example
| int commRestoreParams | ( | comm_settings * | comm_settings_t, |
| int | id | ||
| ) |
This function restores the factory default parameters.
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings. id The device's id number.
- Example
| void commSetBaudRate | ( | comm_settings * | comm_settings_t, |
| int | id, | ||
| short int | baudrate | ||
| ) |
This function sets the baudrate of communication.
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings. id The device's id number. baudrate BaudRate requested 0 = 2M baudrate, 1 = 460.8k baudrate
- Example
| void commSetCuffInputs | ( | comm_settings * | comm_settings_t, |
| int | id, | ||
| int | flag | ||
| ) |
This function send reference inputs to a qbMove board connected to the serial port.
Is used only when the device is a Cuff.
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings. id The device's id number. flag A flag that indicates used to activate the cuff driving functionality of the board.
- Example
| void commSetInputs | ( | comm_settings * | comm_settings_t, |
| int | id, | ||
| short int | inputs[] | ||
| ) |
This function send reference inputs to a qbMove or a qbHand connected to the serial port.
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings. id The device's id number. inputs Input references.
- Example
| int commSetInputsAck | ( | comm_settings * | comm_settings_t, |
| int | id, | ||
| short int | inputs[] | ||
| ) |
This function send reference inputs to a qbMove or a qbHand connected to the serial port and expects an acknowledgment reply from the device.
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings. id The device's id number. inputs Input references.
- Example
| void commSetPosStiff | ( | comm_settings * | comm_settings_t, |
| int | id, | ||
| short int | inputs[] | ||
| ) |
This function send reference inputs to a qbMove connected to the serial port.
The reference is in shaft position and stiffness preset. IS VALID ONLY WHEN USED FOR THE qbMove, NOT FOR THE qbHand
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings. id The device's id number. inputs Input references.
- Example
| void commSetWatchDog | ( | comm_settings * | comm_settings_t, |
| int | id, | ||
| short int | wdt | ||
| ) |
This function sets watchdog timer of a qbMove or a qbHand.
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings. id The device's id number. wdt Watchdog timer in [csec], max value: 500 [cs] / min value: 0 (disable) [cs]
- Example
| int commSetZeros | ( | comm_settings * | comm_settings_t, |
| int | id, | ||
| void * | values, | ||
| unsigned short | num_of_values | ||
| ) |
This function sets the encoders's zero positon value that remains stored in the qbMove or qbHand memory.
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings. id The device's id number. value An array with the encoder readings values. num_of_values The size of the values array, equal to the sensor number.
- Example
| int commStoreDefaultParams | ( | comm_settings * | comm_settings_t, |
| int | id | ||
| ) |
This function stores the factory default parameters.
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings. id The device's id number.
- Example
| int commStoreParams | ( | comm_settings * | comm_settings_t, |
| int | id | ||
| ) |
This function stores all parameters that were set in the qbMove or the qbHand memory.
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings. id The device's id number.
- Example
| void openRS485 | ( | comm_settings * | comm_settings_t, |
| const char * | port_s, | ||
| int | BAUD_RATE = B2000000 |
||
| ) |
This function is used to open a serial port for using with the qbMove or the qbHand.
- Parameters
-
comm_settings A comm_settings structure containing info about the communication settings. port_s The string to the serial port path. BAUD_RATE The default baud rate value of the serial port
- Returns
- Returns the file descriptor associated to the serial port.
- Example
| void RS485GetInfo | ( | comm_settings * | comm_settings_t, |
| char * | buffer | ||
| ) |
This function is used to ping the serial port for a qbMove or a qbHand and to get information about the device.
ONLY USE WHEN ONE DEVICE IS CONNECTED ONLY.
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings. buffer Buffer that stores a string with information about the device. BUFFER SIZE MUST BE AT LEAST 500.
- Example
| int RS485ListDevices | ( | comm_settings * | comm_settings_t, |
| char | list_of_ids[255] | ||
| ) |
This function is used to list the number of devices connected to the serial port and get their relative IDs.
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings. list_of_ids[255] Buffer that stores a list of IDs to ping, in order to see which of those IDs is connected. Is then filled with the IDs connected to the serial port.
- Returns
- Returns the number of devices connected
- Example
| int RS485listPorts | ( | char | list_of_ports[10][255] | ) |
This function is used to return a list of available serial ports.
A maximum of 10 ports are found.
- Parameters
-
list_of_ports An array of strings with the serial ports paths.
- Returns
- Returns the number of serial ports found.
- Example
| int RS485read | ( | comm_settings * | comm_settings_t, |
| int | id, | ||
| char * | package | ||
| ) |
This function is used to read a package from the device.
- Parameters
-
comm_settings_t A comm_settings structure containing info about the communication settings. id The device's id number. package Package will be stored here.
- Returns
- Returns package length if communication was ok, -1 otherwise.
- Example
| long timevaldiff | ( | struct timeval * | starttime, |
| struct timeval * | finishtime | ||
| ) |
This functions returns a difference between two timeval structures in order to obtain time elapsed between the two timeval;.
- Parameters
-
starttime The timeval structure containing the start time finishtime The timeval structure containing the finish time
- Returns
- Returns the elapsed time between the two timeval structures.
- Example