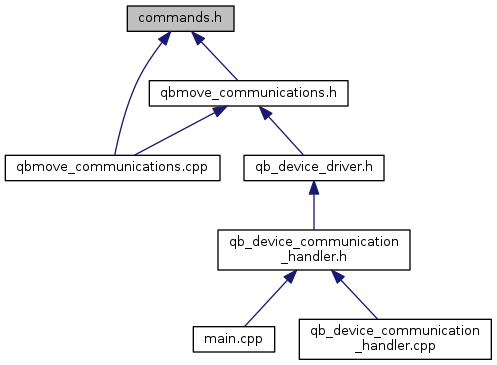
Definitions for qbMove or qbHand commands, parameters and packages. More...
Go to the source code of this file.
Macros | |
| #define | API_VERSION "v6.2.0" |
QB Move Information Strings | |
| #define | INFO_ALL 0 |
| All system information. More... | |
Enumerations | |
qbMove and qbHand Commands | |
| enum | qbmove_command { CMD_PING = 0, CMD_SET_ZEROS = 1, CMD_STORE_PARAMS = 3, CMD_STORE_DEFAULT_PARAMS = 4, CMD_RESTORE_PARAMS = 5, CMD_GET_INFO = 6, CMD_SET_VALUE = 7, CMD_GET_VALUE = 8, CMD_BOOTLOADER = 9, CMD_INIT_MEM = 10, CMD_CALIBRATE = 11, CMD_GET_PARAM_LIST = 12, CMD_HAND_CALIBRATE = 13, CMD_ACTIVATE = 128, CMD_GET_ACTIVATE = 129, CMD_SET_INPUTS = 130, CMD_GET_INPUTS = 131, CMD_GET_MEASUREMENTS = 132, CMD_GET_CURRENTS = 133, CMD_GET_CURR_AND_MEAS = 134, CMD_SET_POS_STIFF = 135, CMD_GET_EMG = 136, CMD_GET_VELOCITIES = 137, CMD_GET_COUNTERS = 138, CMD_GET_ACCEL = 139, CMD_GET_CURR_DIFF = 140, CMD_SET_CURR_DIFF = 141, CMD_SET_CUFF_INPUTS = 142, CMD_SET_WATCHDOG = 143, CMD_SET_BAUDRATE = 144, CMD_EXT_DRIVE = 145, CMD_GET_JOYSTICK = 146, CMD_SET_INPUTS_ACK = 147 } |
Detailed Description
Definitions for qbMove or qbHand commands, parameters and packages.
This file is included in the qbMove and qbHand firmware, in its libraries and applications. It contains all definitions that are necessary for the contruction of communication packages.
It includes definitions for all of the device commands, parameters and also the size of answer packages.
Definition in file commands.h.
Macro Definition Documentation
| #define API_VERSION "v6.2.0" |
Definition at line 49 of file commands.h.
| #define INFO_ALL 0 |
All system information.
Definition at line 257 of file commands.h.
| #define PARAM_BYTE_SLOT 50 |
Definition at line 247 of file commands.h.
| #define PARAM_MENU_SLOT 150 |
Definition at line 248 of file commands.h.
Enumeration Type Documentation
| Enumerator | |
|---|---|
| ACK_ERROR | |
| ACK_OK | |
Definition at line 227 of file commands.h.
| enum data_types |
| Enumerator | |
|---|---|
| TYPE_FLAG | |
| TYPE_INT8 | |
| TYPE_UINT8 | |
| TYPE_INT16 | |
| TYPE_UINT16 | |
| TYPE_INT32 | |
| TYPE_UINT32 | |
| TYPE_FLOAT | |
| TYPE_DOUBLE | |
Definition at line 235 of file commands.h.
| enum motor_supply_tipe |
| Enumerator | |
|---|---|
| MAXON_24V | |
| MAXON_12V | |
Definition at line 222 of file commands.h.
| enum qbmove_command |
Definition at line 60 of file commands.h.
| enum qbmove_control_mode |
Definition at line 209 of file commands.h.
| enum qbmove_input_mode |
Definition at line 191 of file commands.h.
| enum qbmove_parameter |
Definition at line 133 of file commands.h.
| enum qbmove_resolution |
| Enumerator | |
|---|---|
| RESOLUTION_360 | |
| RESOLUTION_720 | |
| RESOLUTION_1440 | |
| RESOLUTION_2880 | |
| RESOLUTION_5760 | |
| RESOLUTION_11520 | |
| RESOLUTION_23040 | |
| RESOLUTION_46080 | |
| RESOLUTION_92160 | |
Definition at line 176 of file commands.h.