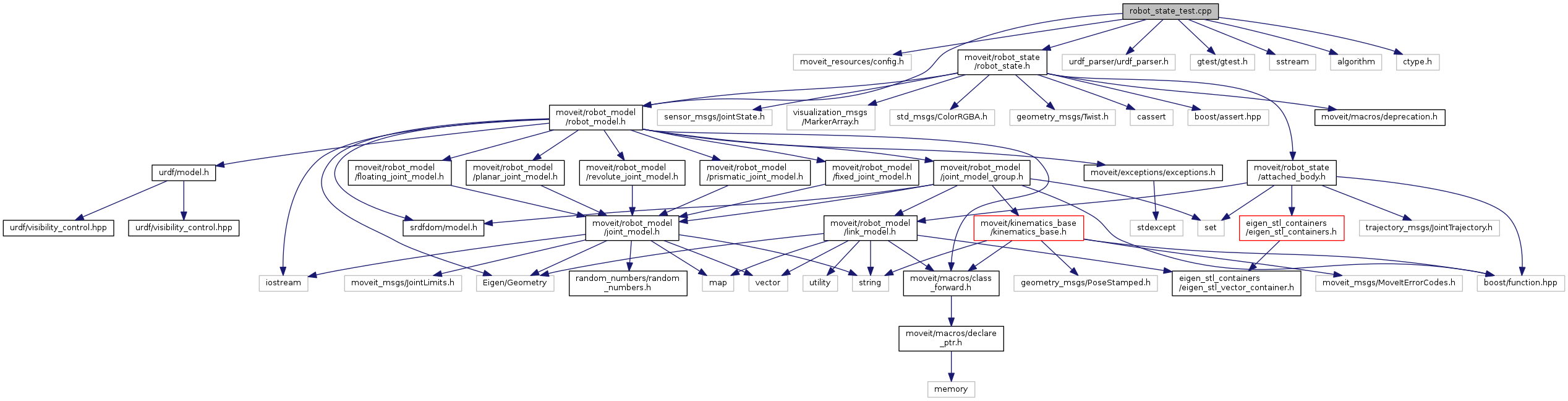
#include <moveit_resources/config.h>#include <moveit/robot_model/robot_model.h>#include <moveit/robot_state/robot_state.h>#include <urdf_parser/urdf_parser.h>#include <gtest/gtest.h>#include <sstream>#include <algorithm>#include <ctype.h>
Include dependency graph for robot_state_test.cpp:
Go to the source code of this file.
Classes | |
| class | OneRobot |
Macros | |
| #define | EXPECT_NEAR_TRACED(...) |
Functions | |
| static void | expect_near (const Eigen::MatrixXd &x, const Eigen::MatrixXd &y, double eps=std::numeric_limits< double >::epsilon()) |
| std::size_t | generateTestTraj (std::vector< std::shared_ptr< robot_state::RobotState >> &traj, const moveit::core::RobotModelConstPtr &robot_model, const robot_model::JointModelGroup *joint_model_group) |
| int | main (int argc, char **argv) |
| static bool | sameStringIgnoringWS (const std::string &s1, const std::string &s2) |
| TEST (Loading, SimpleRobot) | |
| TEST (LoadingAndFK, SimpleRobot) | |
| TEST_F (OneRobot, FK) | |
| TEST_F (OneRobot, testGenerateTrajectory) | |
| TEST_F (OneRobot, testAbsoluteJointSpaceJump) | |
| TEST_F (OneRobot, testRelativeJointSpaceJump) | |
Macro Definition Documentation
| #define EXPECT_NEAR_TRACED | ( | ... | ) |
Value:
{ \
expect_near(__VA_ARGS__); \
}
static void expect_near(const Eigen::MatrixXd &x, const Eigen::MatrixXd &y, double eps=std::numeric_limits< double >::epsilon())
Definition: robot_state_test.cpp:69
Definition at line 80 of file robot_state_test.cpp.
Function Documentation
|
static |
Definition at line 69 of file robot_state_test.cpp.
| std::size_t generateTestTraj | ( | std::vector< std::shared_ptr< robot_state::RobotState >> & | traj, |
| const moveit::core::RobotModelConstPtr & | robot_model, | ||
| const robot_model::JointModelGroup * | joint_model_group | ||
| ) |
Definition at line 574 of file robot_state_test.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 712 of file robot_state_test.cpp.
|
static |
Definition at line 45 of file robot_state_test.cpp.
| TEST | ( | Loading | , |
| SimpleRobot | |||
| ) |
Definition at line 86 of file robot_state_test.cpp.
| TEST | ( | LoadingAndFK | , |
| SimpleRobot | |||
| ) |
Definition at line 135 of file robot_state_test.cpp.
| TEST_F | ( | OneRobot | , |
| FK | |||
| ) |
Definition at line 410 of file robot_state_test.cpp.
| TEST_F | ( | OneRobot | , |
| testGenerateTrajectory | |||
| ) |
Definition at line 617 of file robot_state_test.cpp.
| TEST_F | ( | OneRobot | , |
| testAbsoluteJointSpaceJump | |||
| ) |
Definition at line 632 of file robot_state_test.cpp.
| TEST_F | ( | OneRobot | , |
| testRelativeJointSpaceJump | |||
| ) |
Definition at line 679 of file robot_state_test.cpp.