Obstacle distance plugin. More...
#include <mavros/mavros_plugin.h>#include <sensor_msgs/LaserScan.h>#include <pluginlib/class_list_macros.h>
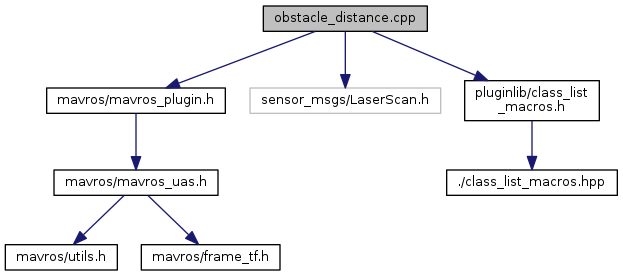
Include dependency graph for obstacle_distance.cpp:
Go to the source code of this file.
Classes | |
| class | mavros::extra_plugins::ObstacleDistancePlugin |
| Obstacle distance plugin. More... | |
Namespaces | |
| mavros | |
| mavros::extra_plugins | |
Variables | |
| static constexpr double | mavros::extra_plugins::RAD_TO_DEG = 180.0 / M_PI |
| Radians to degrees. More... | |
Detailed Description
Obstacle distance plugin.
Definition in file obstacle_distance.cpp.