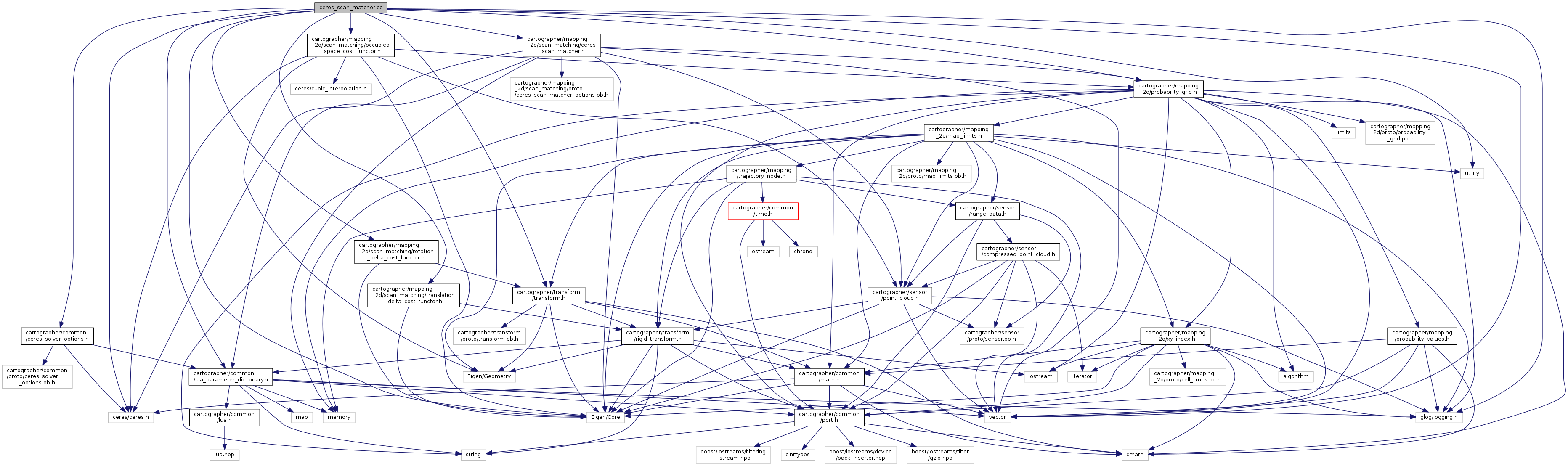
#include "cartographer/mapping_2d/scan_matching/ceres_scan_matcher.h"#include <utility>#include <vector>#include "Eigen/Core"#include "cartographer/common/ceres_solver_options.h"#include "cartographer/common/lua_parameter_dictionary.h"#include "cartographer/mapping_2d/probability_grid.h"#include "cartographer/mapping_2d/scan_matching/occupied_space_cost_functor.h"#include "cartographer/mapping_2d/scan_matching/rotation_delta_cost_functor.h"#include "cartographer/mapping_2d/scan_matching/translation_delta_cost_functor.h"#include "cartographer/transform/transform.h"#include "ceres/ceres.h"#include "glog/logging.h"
Include dependency graph for mapping_2d/scan_matching/ceres_scan_matcher.cc:
Go to the source code of this file.
Namespaces | |
| cartographer | |
| cartographer::mapping_2d | |
| cartographer::mapping_2d::scan_matching | |
Functions | |
| proto::CeresScanMatcherOptions | cartographer::mapping_2d::scan_matching::CreateCeresScanMatcherOptions (common::LuaParameterDictionary *const parameter_dictionary) |